-
![[image]](https://www.balancer.ru/cache/sites/com/ho/hostingkartinok/s5/uploads/images/2013/07/128x128-crop/7dafe16f2f1656e07a7ec1aae06ac8bb.jpg)
Фотограмметрия для кухарок
Геометрические измерения по фотоТеги:
 Старый
Старый
Hal> Понял, спасибо. А измеренный угол наклона ЛМ это угол между чем и чем?
Как я понимаю между горизонтированной плоскостью гироплатформы и её же корпусом жёстко связаным с корпусом ЛМа.
Как я понимаю между горизонтированной плоскостью гироплатформы и её же корпусом жёстко связаным с корпусом ЛМа.


 инфо
инфо инструменты
инструменты
7-40> А у РМ есть trial-версия?
Я брал v6.2.2 емнип через forums.airbase.ru/2010/01/t69511,10--fotogrammetriya-dlya-kukharok.html[red]Ссылка
Я брал v6.2.2 емнип через forums.airbase.ru/2010/01/t69511,10--fotogrammetriya-dlya-kukharok.html[red]Ссылка

N.A.> Кстати,
Вдогонку, еще пара ссылок на бесплатные альтернативы:
1. Опенсорс: insight 3d - opensource image based 3d modeling software
2. Звучит как фантастика: 3-D Modeling Advance. A single photo can be reconstructed into a 3-D scene with Make3D.

Вдогонку, еще пара ссылок на бесплатные альтернативы:
1. Опенсорс: insight 3d - opensource image based 3d modeling software
2. Звучит как фантастика: 3-D Modeling Advance. A single photo can be reconstructed into a 3-D scene with Make3D.

 7-40
7-40

Я сильно ищу альтернативу. Причин две.
1) После примерно 20 изображений я с IM не работал, а мучился. Сколько рабочего времени я потратил на несчастные ~120 фото - не счесть (уже только поэтому публикация нужна просто как компенсация и отчет о безвозвратно потраченном ресурсе") ), но это была тяжелая неравная борьба с нестабильностью проклятой машинки. То, что по-хорошему должно делаться за час - делалось порой за несколько дней. Я остановился в октябре, зааттачив в сцену все, кроме 5 фоток Boot Print Soil Experiment, но в сцене остались некоторые ясно видимые мне погрешности, исправить которые было бы можно, если бы оно работало нормально. Но нестабильность вышла, похоже, на фазу экспоненциального роста: теперь крушение регулярно вызывают даже моделирующие локаторы (!), а сохраненная калибрующаяся версия легко может отказаться перекалибровываться после закрытия и повторного открытия. Это уже на грани добра и зла, особенно если учесть, что на моем i7 (пусть и ноутбуковском) одна калибровка занимает минут 6.
), но это была тяжелая неравная борьба с нестабильностью проклятой машинки. То, что по-хорошему должно делаться за час - делалось порой за несколько дней. Я остановился в октябре, зааттачив в сцену все, кроме 5 фоток Boot Print Soil Experiment, но в сцене остались некоторые ясно видимые мне погрешности, исправить которые было бы можно, если бы оно работало нормально. Но нестабильность вышла, похоже, на фазу экспоненциального роста: теперь крушение регулярно вызывают даже моделирующие локаторы (!), а сохраненная калибрующаяся версия легко может отказаться перекалибровываться после закрытия и повторного открытия. Это уже на грани добра и зла, особенно если учесть, что на моем i7 (пусть и ноутбуковском) одна калибровка занимает минут 6.  В общем, Tranquility Base оказалась обильно полита моими слезами, потом и кровью, если не упоминать чего покрепче.
В общем, Tranquility Base оказалась обильно полита моими слезами, потом и кровью, если не упоминать чего покрепче.
2) Месяц назад я попытался начать с А-12, но никак не могу обойти непредвиденные осложнения. Я, на основе опыта с Tranquility Base, решил сначала целиком отработать полные панорамы, сделанные вблизи ЛМ. Этих панорам там заметно больше, чем в А-11 (похоже, бОльшая часть снимков сделана именно в рамках панорам, а доля одиночных снимков с разных точек заметно меньше; кроме того, несколько панорам дублируются, будучи отснятыми с близких точек: Бин повторял за Конрада его работу, т. к. Конрад по ошибке поставил слишком близкий фокус). Так вот почему-то с самого начала не удается достичь соответствия при добавлении снимков, снятых в рамках панорам к северу от ЛМ. Делаешь сцену из полудюжины снимков в сторону ЛМ из западных и южной панорамы - вроде, все хорошо. Добавляешь снимки с севера на юг - все идет наперекосяк, несоответствия становятся слишком большие (особенно когда пытаешься добиться согласнования локаторов на стене Surveyor Crater). Конечно, при небольшой сцене многие вещи могут "плавать" при добавлении новых снимков, но мне попросту не удается получить удовлетворительный результат. Я уж думал, что ЛМ мог немного "просесть" под своим весом в какой-то момент, но все-таки решил, что вряд ли дело в нем. В общем, не знаю. Пока отложил в сторону.
На Tranquility Base у меня аналогичная ситуация возникла с комплектом из самых последних 4-х снимков, 5967-70. Они никак не хотят вписываться в сцену ровно: как будто все они чуть растянуты по горизонтали в сравнении с тем, что должно быть. Думал списать это на коробление или сдвиг пленки в самых последних кадрах перед ее концом - но, вроде, расстояния между крестами и на этих кадрах примерно одинаковое по площади кадра, так что гипотеза, вроде, отпадает. Не знаю, в что здесь еще может быть. Вроде, как-то это может быть все-таки связано с концом пленки? Ведь почему-то именно эти 4 очень похожих друг на друга кадра. Ни с одним из остальных кадров ничего похожего не было: все расхождения такого систематического характера не имеют и явно связаны с погрешностью калибровки. А вот эти 4 кадра - уже пытался отсоединить и снова приататчить - всё результат один. Вряд ли это Кубрик напортачил. В общем, оставил как есть: погрешность все равно невелика и сказывается практически только на этих кадрах. Может, в результате положения этих камер определены несколько менее точно. Но все в рамках приличия. Хотя узнать причину было бы любопытно, чисто для себя.
А вот с А-12 просто пока не знаю, что делать. Отложил ее просто в сторону и решил, что браться не буду, пока не представлю публикацию по А-11. Но если бы удалось попробовать альтернативный софт, было бы неплохо. На начальном этапе построения сцены дело может оказаться именно в алгоритме поиска решения: если поверхность решений вблизи экстремума слишком плоская, то машинка легко может заблудиться в локальных экстремумах, так и не найдя глобального... Тут как раз полезно попробовать несколько разных программ.
Вот.
1) После примерно 20 изображений я с IM не работал, а мучился. Сколько рабочего времени я потратил на несчастные ~120 фото - не счесть (уже только поэтому публикация нужна просто как компенсация и отчет о безвозвратно потраченном ресурсе
), но это была тяжелая неравная борьба с нестабильностью проклятой машинки. То, что по-хорошему должно делаться за час - делалось порой за несколько дней. Я остановился в октябре, зааттачив в сцену все, кроме 5 фоток Boot Print Soil Experiment, но в сцене остались некоторые ясно видимые мне погрешности, исправить которые было бы можно, если бы оно работало нормально. Но нестабильность вышла, похоже, на фазу экспоненциального роста: теперь крушение регулярно вызывают даже моделирующие локаторы (!), а сохраненная калибрующаяся версия легко может отказаться перекалибровываться после закрытия и повторного открытия. Это уже на грани добра и зла, особенно если учесть, что на моем i7 (пусть и ноутбуковском) одна калибровка занимает минут 6. В общем, Tranquility Base оказалась обильно полита моими слезами, потом и кровью, если не упоминать чего покрепче. 2) Месяц назад я попытался начать с А-12, но никак не могу обойти непредвиденные осложнения. Я, на основе опыта с Tranquility Base, решил сначала целиком отработать полные панорамы, сделанные вблизи ЛМ. Этих панорам там заметно больше, чем в А-11 (похоже, бОльшая часть снимков сделана именно в рамках панорам, а доля одиночных снимков с разных точек заметно меньше; кроме того, несколько панорам дублируются, будучи отснятыми с близких точек: Бин повторял за Конрада его работу, т. к. Конрад по ошибке поставил слишком близкий фокус). Так вот почему-то с самого начала не удается достичь соответствия при добавлении снимков, снятых в рамках панорам к северу от ЛМ. Делаешь сцену из полудюжины снимков в сторону ЛМ из западных и южной панорамы - вроде, все хорошо. Добавляешь снимки с севера на юг - все идет наперекосяк, несоответствия становятся слишком большие (особенно когда пытаешься добиться согласнования локаторов на стене Surveyor Crater). Конечно, при небольшой сцене многие вещи могут "плавать" при добавлении новых снимков, но мне попросту не удается получить удовлетворительный результат. Я уж думал, что ЛМ мог немного "просесть" под своим весом в какой-то момент, но все-таки решил, что вряд ли дело в нем. В общем, не знаю. Пока отложил в сторону.
На Tranquility Base у меня аналогичная ситуация возникла с комплектом из самых последних 4-х снимков, 5967-70. Они никак не хотят вписываться в сцену ровно: как будто все они чуть растянуты по горизонтали в сравнении с тем, что должно быть. Думал списать это на коробление или сдвиг пленки в самых последних кадрах перед ее концом - но, вроде, расстояния между крестами и на этих кадрах примерно одинаковое по площади кадра, так что гипотеза, вроде, отпадает. Не знаю, в что здесь еще может быть. Вроде, как-то это может быть все-таки связано с концом пленки? Ведь почему-то именно эти 4 очень похожих друг на друга кадра. Ни с одним из остальных кадров ничего похожего не было: все расхождения такого систематического характера не имеют и явно связаны с погрешностью калибровки. А вот эти 4 кадра - уже пытался отсоединить и снова приататчить - всё результат один. Вряд ли это Кубрик напортачил.
В общем, оставил как есть: погрешность все равно невелика и сказывается практически только на этих кадрах. Может, в результате положения этих камер определены несколько менее точно. Но все в рамках приличия. Хотя узнать причину было бы любопытно, чисто для себя.А вот с А-12 просто пока не знаю, что делать. Отложил ее просто в сторону и решил, что браться не буду, пока не представлю публикацию по А-11.
Но если бы удалось попробовать альтернативный софт, было бы неплохо. На начальном этапе построения сцены дело может оказаться именно в алгоритме поиска решения: если поверхность решений вблизи экстремума слишком плоская, то машинка легко может заблудиться в локальных экстремумах, так и не найдя глобального... Тут как раз полезно попробовать несколько разных программ.Вот.


7-40> Я сильно ищу альтернативу. Причин две.
7-40> 1) После примерно 20 изображений я с IM не работал, а мучился.
7-40> 2) Месяц назад я попытался начать с А-12, но никак не могу обойти непредвиденные
Возможно, что так уж устроен мир. Панорамные снимки с небольшими стереобазой и углами, да с точками, лежащими примерно в одной плоскости - наверняка тяжелый случай. Это я к тому, что м.б. ну их к лешему, эти унылые равнины - пора в горы и долины А-15 или А-17.")
PM кстати имеет некоторое количество костылей для продвинутого пользователя - например показывает на 3D возможный разброс положения точек (?), + имеет некие настройки, позволяющие хоть как-то управлять процессом - количество итераций + какие-то пороги. При этом он выдает отчет о результатах процессинга, включающий в т.ч. соображения по тому, как исправить ситуацию в случае неуспеха. Соображения эти впрочем почти очевидны - "используйте поменьше снимков с достаточными взаимными углами, ставьте поменьше точек максимально распределенных по полю кадра" и т.п.
Не исключено, что самый лучший вариант - углубиться в теорию и/или что-нибудь вроде Matlab EGT, чтобы убедиться в том, что все так и должно быть - возможно к-л погрешность накапливается, либо уже нельзя пренебрегать дисторсией или еще к-л нелинейностями...
ЗЫ. Кстати - может быть выход в том, чтобы разбить большой проект на несколько маленьких, с относительно небольшим числом снимков в каждом? Если конечно удастся найти способ их привязки к одной СК...
7-40> 1) После примерно 20 изображений я с IM не работал, а мучился.
7-40> 2) Месяц назад я попытался начать с А-12, но никак не могу обойти непредвиденные
Возможно, что так уж устроен мир. Панорамные снимки с небольшими стереобазой и углами, да с точками, лежащими примерно в одной плоскости - наверняка тяжелый случай. Это я к тому, что м.б. ну их к лешему, эти унылые равнины - пора в горы и долины А-15 или А-17.
PM кстати имеет некоторое количество костылей для продвинутого пользователя - например показывает на 3D возможный разброс положения точек (?), + имеет некие настройки, позволяющие хоть как-то управлять процессом - количество итераций + какие-то пороги. При этом он выдает отчет о результатах процессинга, включающий в т.ч. соображения по тому, как исправить ситуацию в случае неуспеха. Соображения эти впрочем почти очевидны - "используйте поменьше снимков с достаточными взаимными углами, ставьте поменьше точек максимально распределенных по полю кадра" и т.п.
Не исключено, что самый лучший вариант - углубиться в теорию и/или что-нибудь вроде Matlab EGT, чтобы убедиться в том, что все так и должно быть - возможно к-л погрешность накапливается, либо уже нельзя пренебрегать дисторсией или еще к-л нелинейностями...
ЗЫ. Кстати - может быть выход в том, чтобы разбить большой проект на несколько маленьких, с относительно небольшим числом снимков в каждом? Если конечно удастся найти способ их привязки к одной СК...
N.A.> Возможно, что так уж устроен мир. Панорамные снимки с небольшими стереобазой и углами, да с точками, лежащими примерно в одной плоскости - наверняка тяжелый случай.
Это да. Но там я работал одновременно со снимками 5 панорам. Правда, две пары из них сняты с близких точек, так что база у них тоже маленькая. Но все равно выглядело неприятно. С А-11 таких проблем не было. Но там, как ни удивительно, выбор был больше (хотя снимков намного меньше), т. к. ЛМ был отснят из сильно разных точек. В общем, надо будет попробовать с чем-нибудь другим.
Проблема "плоских" снимков (когда все локаторы близки к одной плоскости) абсолютно реальна. IM регулярно сносило крышу от этого - он то и дело предлагал "вывернутые наизнанку" решения. Потом, правда, все реже, когда фоток в пуле стало много. Но некоторые вообще не хотел аттачить. Но я нашел выход (назвал его для себя методом виртуальных якорей): стал создавать искусственные локаторы на высоте нескольких метров и десятков метров, не соответствующие никаким объектам. Просто фиксировал точку с помощью направляющих линий на нескольких снимков, такую, чтоб она была в поле зрения нового "неудобного" снимка. И при подсоединения этого нового снимка приблизительно помечал эту точку соответствующим локатором. С первого раза, конечно, отмечать удавалось только с большой ошибкой, но зато снимок отлично приклеивался, и потом просто этот локатор оставалось сдвигать в ту сторону, куда машинка предлагала. Так что в финальной сцене есть некоторое множество таких виртуальных "летающих" локаторов, делающих сцену менее плоской и лучше перевариваемой.
N.A.> Это я к тому, что м.б. ну их к лешему, эти унылые равнины - пора в горы и долины А-15 или А-17.
Я тоже туда намылился. Но хотел попробовать все-таки сделать еще одну полную сцену, заодно потренироваться со сценами на дистанциях с базисами не десятки метров (как в А-11), а сотни. Т. е. сделать шаг на один порядок, а не сразу на два. Конечно, ~600 снимков А-12 в одну сцену вместить уже не получится, IM это не переварит. Но я надеялся разбить задачу на несколько отдельных сцен.
N.A.> PM кстати имеет некоторое количество костылей для продвинутого пользователя - например показывает на 3D возможный разброс положения точек (?), + имеет некие настройки, позволяющие хоть как-то управлять процессом - количество итераций + какие-то пороги.
Да, я читал про это. Очень хочу попробовать на практике. Вот только еще один пиратский софт не хочу ставить, но, наверное, пока другого выхода нет.
N.A.> Не исключено, что самый лучший вариант - углубиться в теорию и/или что-нибудь вроде Matlab EGT, чтобы убедиться в том, что все так и должно быть - возможно к-л погрешность накапливается, либо уже нельзя пренебрегать дисторсией или еще к-л нелинейностями...
С четырьмя последними снимками А-11 дело явно не в накоплении погрешностей, ну или во всяком случае от этого не прямая зависимость. В сцене они не на последнем месте, а, наоборот, ближе к началу (в первых десятках). Тут что-то другое, не могу понять, что. Если бы расстояния между крестами были бы разными по полю, то не было бы и вопроса. А тут с крестами вроде все ОК. Но может, это все-таки как-то связано с тем, что на пленке это последние кадры... Расхождение там на самом деле небольшое, но оно заметно, и явно систематическое.
N.A.> ЗЫ. Кстати - может быть выход в том, чтобы разбить большой проект на несколько маленьких, с относительно небольшим числом снимков в каждом? Если конечно удастся найти способ их привязки к одной СК...
Я уже понял, что если не удастся заставить IM или любой другой пакет работать стабильно, то разбиение неизбежно. Думал о разбиении уже где-то после 60 фоток А-11. Конечно, это хуже, чем одна общая самосогласованная сцена, но вариантов, пожалуй, нет - если только некий пакет не будет работать так стабильно, что число итераций удастся радикально уменьшить. Тогда время калибровки не вопрос - пусть хоть полчаса или час калибруется, главное, чтобы фотку можно было приаттачить хотя бы за две-три калибровки.
Привязка к одной СК не может быть большой проблемой. В каждой субсцене может быть, скажем, 50 снимков, из которых, к примеру, минимум 5 штук должны быть "старыми", т. е. теми, что уже включены в другие субсцены. Это позволит, во-первых, переносить масштаб и координаты с одной субсцены на другую, а во-вторых, обеспечит инструмент для взаимного контроля между субсценами. Думаю, это позволит уменьшить величину погрешностей, хоть и увеличит на 10 % объем работы.
Это да. Но там я работал одновременно со снимками 5 панорам. Правда, две пары из них сняты с близких точек, так что база у них тоже маленькая. Но все равно выглядело неприятно. С А-11 таких проблем не было. Но там, как ни удивительно, выбор был больше (хотя снимков намного меньше), т. к. ЛМ был отснят из сильно разных точек. В общем, надо будет попробовать с чем-нибудь другим.
Проблема "плоских" снимков (когда все локаторы близки к одной плоскости) абсолютно реальна. IM регулярно сносило крышу от этого - он то и дело предлагал "вывернутые наизнанку" решения. Потом, правда, все реже, когда фоток в пуле стало много. Но некоторые вообще не хотел аттачить. Но я нашел выход (назвал его для себя методом виртуальных якорей): стал создавать искусственные локаторы на высоте нескольких метров и десятков метров, не соответствующие никаким объектам. Просто фиксировал точку с помощью направляющих линий на нескольких снимков, такую, чтоб она была в поле зрения нового "неудобного" снимка. И при подсоединения этого нового снимка приблизительно помечал эту точку соответствующим локатором. С первого раза, конечно, отмечать удавалось только с большой ошибкой, но зато снимок отлично приклеивался, и потом просто этот локатор оставалось сдвигать в ту сторону, куда машинка предлагала. Так что в финальной сцене есть некоторое множество таких виртуальных "летающих" локаторов, делающих сцену менее плоской и лучше перевариваемой.
N.A.> Это я к тому, что м.б. ну их к лешему, эти унылые равнины - пора в горы и долины А-15 или А-17.
Я тоже туда намылился.
Но хотел попробовать все-таки сделать еще одну полную сцену, заодно потренироваться со сценами на дистанциях с базисами не десятки метров (как в А-11), а сотни. Т. е. сделать шаг на один порядок, а не сразу на два. Конечно, ~600 снимков А-12 в одну сцену вместить уже не получится, IM это не переварит. Но я надеялся разбить задачу на несколько отдельных сцен.N.A.> PM кстати имеет некоторое количество костылей для продвинутого пользователя - например показывает на 3D возможный разброс положения точек (?), + имеет некие настройки, позволяющие хоть как-то управлять процессом - количество итераций + какие-то пороги.
Да, я читал про это. Очень хочу попробовать на практике. Вот только еще один пиратский софт не хочу ставить, но, наверное, пока другого выхода нет.
N.A.> Не исключено, что самый лучший вариант - углубиться в теорию и/или что-нибудь вроде Matlab EGT, чтобы убедиться в том, что все так и должно быть - возможно к-л погрешность накапливается, либо уже нельзя пренебрегать дисторсией или еще к-л нелинейностями...
С четырьмя последними снимками А-11 дело явно не в накоплении погрешностей, ну или во всяком случае от этого не прямая зависимость. В сцене они не на последнем месте, а, наоборот, ближе к началу (в первых десятках). Тут что-то другое, не могу понять, что. Если бы расстояния между крестами были бы разными по полю, то не было бы и вопроса. А тут с крестами вроде все ОК. Но может, это все-таки как-то связано с тем, что на пленке это последние кадры... Расхождение там на самом деле небольшое, но оно заметно, и явно систематическое.
N.A.> ЗЫ. Кстати - может быть выход в том, чтобы разбить большой проект на несколько маленьких, с относительно небольшим числом снимков в каждом? Если конечно удастся найти способ их привязки к одной СК...
Я уже понял, что если не удастся заставить IM или любой другой пакет работать стабильно, то разбиение неизбежно. Думал о разбиении уже где-то после 60 фоток А-11. Конечно, это хуже, чем одна общая самосогласованная сцена, но вариантов, пожалуй, нет - если только некий пакет не будет работать так стабильно, что число итераций удастся радикально уменьшить. Тогда время калибровки не вопрос - пусть хоть полчаса или час калибруется, главное, чтобы фотку можно было приаттачить хотя бы за две-три калибровки.
Привязка к одной СК не может быть большой проблемой. В каждой субсцене может быть, скажем, 50 снимков, из которых, к примеру, минимум 5 штук должны быть "старыми", т. е. теми, что уже включены в другие субсцены. Это позволит, во-первых, переносить масштаб и координаты с одной субсцены на другую, а во-вторых, обеспечит инструмент для взаимного контроля между субсценами. Думаю, это позволит уменьшить величину погрешностей, хоть и увеличит на 10 % объем работы.
7-40> Да, я читал про это. Очень хочу попробовать на практике. Вот только еще один пиратский софт не хочу ставить, но, наверное, пока другого выхода нет.
Влад, загляните в почту - я переслал Вам занятное письмо от PM'овцев, которое пришло просто как реакция на скачивание мною триала с их сайта на днях. Возможно, что есть способ обойтись без еще одного греха на душу...
Влад, загляните в почту - я переслал Вам занятное письмо от PM'овцев, которое пришло просто как реакция на скачивание мною триала с их сайта на днях. Возможно, что есть способ обойтись без еще одного греха на душу...
7-40> 2) Месяц назад я попытался начать с А-12, но никак не могу обойти непредвиденные осложнения. Я, на основе опыта с Tranquility Base, решил сначала целиком отработать полные панорамы, сделанные вблизи ЛМ. Этих панорам там заметно больше, чем в А-11 (похоже, бОльшая часть снимков сделана именно в рамках панорам, а доля одиночных снимков с разных точек заметно меньше; кроме того, несколько панорам дублируются, будучи отснятыми с близких точек: Бин повторял за Конрада его работу, т. к. Конрад по ошибке поставил слишком близкий фокус). Так вот почему-то с самого начала не удается достичь соответствия при добавлении снимков, снятых в рамках панорам к северу от ЛМ. Делаешь сцену из полудюжины снимков в сторону ЛМ из западных и южной панорамы - вроде, все хорошо. Добавляешь снимки с севера на юг - все идет наперекосяк, несоответствия становятся слишком большие (особенно когда пытаешься добиться согласнования локаторов на стене Surveyor Crater). Конечно, при небольшой сцене многие вещи могут "плавать" при добавлении новых снимков, но мне попросту не удается получить удовлетворительный результат. Я уж думал, что ЛМ мог немного "просесть" под своим весом в какой-то момент, но все-таки решил, что вряд ли дело в нем. В общем, не знаю. Пока отложил в сторону.
В общем, да здравствует Кубрик, и шоб им в Autodesk было хорошо. После длинных серий проб и ошибок все стало на свои места. Просто, оказывается, если какой-то снимок не хочет "становиться" - его нужно отложить и попробовать включить потом.
Короче, с А-12 все стало получаться. Причем первые 30 снимков стали на свои места с удивительной скоростью и точностью. Дальше все не так приятно, но только из-за багов IM, который отказывается калибровать в совершенно невинных ситуациях. Но в целом все выглядит обещающе. Времени заниматься А-12 вплотную у меня нет, но шесть панорам вблизи ЛМ готовы примерно на треть. Может быть, как-нибудь когда-нибудь удастся их завершить мало-помалу. Начальный план - сделать эти 6 панорам (в сумме около 120 снимков).
Кубрика разоблачить не удалось, все выглядит как одна сцена без склеек и задних планов. Объекты пока лоцируются на расстояниях сотен метров, но со снимками ЛРО я еще не сравнивал, времени не было.
В общем, да здравствует Кубрик, и шоб им в Autodesk было хорошо.
После длинных серий проб и ошибок все стало на свои места. Просто, оказывается, если какой-то снимок не хочет "становиться" - его нужно отложить и попробовать включить потом.Короче, с А-12 все стало получаться. Причем первые 30 снимков стали на свои места с удивительной скоростью и точностью. Дальше все не так приятно, но только из-за багов IM, который отказывается калибровать в совершенно невинных ситуациях. Но в целом все выглядит обещающе. Времени заниматься А-12 вплотную у меня нет, но шесть панорам вблизи ЛМ готовы примерно на треть. Может быть, как-нибудь когда-нибудь удастся их завершить мало-помалу. Начальный план - сделать эти 6 панорам (в сумме около 120 снимков).
Кубрика разоблачить не удалось, все выглядит как одна сцена без склеек и задних планов.
Объекты пока лоцируются на расстояниях сотен метров, но со снимками ЛРО я еще не сравнивал, времени не было.

На "большаке" радуются выходу бесплатной фотограмметрической программы от Autodesk:
Project Photofly 2.0 выпущен. Можно начинать Autodesk Labs Project Photofly Now 123D Catch Beta


Y.K.> На "большаке" радуются выходу бесплатной фотограмметрической программы от Autodesk:
Ага, Цэ-Рил надеется что у какого-нить трахайца - опять ура! ничего не получится!!! Наверняка, кстати - можно даже не пробовать.
А софт похоже прелюбопытный. Вот здесь стелют очень мягко:
И, кстати:
Ага, Цэ-Рил надеется что у какого-нить трахайца - опять ура! ничего не получится!!! Наверняка, кстати - можно даже не пробовать.
А софт похоже прелюбопытный. Вот здесь стелют очень мягко:
Both Project Photofly and PhotoModel3D are fully-automated, end-to-end 3D modeling systems that take as input digital photographs and produce 3D computer models as output without any user intervention. Input pcitures for the comparison study were taken using hand-held, cosumer-market, point-and-shoot cameras and camera phones. These cameras were not calibrated. No special care was exercised and no photography equipment (e.g., tripod) was used in taking the pictures. These pictures were of different sizes but we down sampled them to a uniform VGA (640x480) size for processing. No other information, other than the VGA-sized pictures, were given to both programs for processing.
И, кстати:
Photofly and Imagemodeler
Paulovich> Found that Imagemodeler and Photofly are compatible arfer all!! Even if the just generated .rzi from the Photofly server does not open in Imagemodeler, after exporting .rzi format yes it does, so all the tedious task of matching is automated.
scott.sheppard> Alas that accidental compatibility will not last.
Это сообщение редактировалось 01.06.2011 в 18:11
N.A.> А софт похоже прелюбопытный.
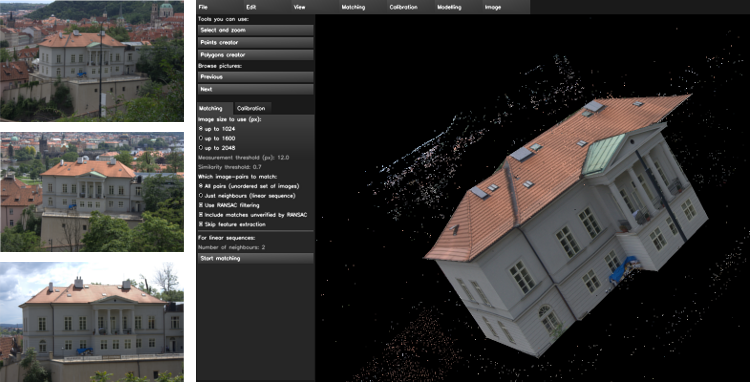
Попробовал покрутить. Забавно.
Поставил (линк, нужна формальная регистрация, если уже есть то можно через прямой линк) Загрузил 4 первых попавшихся фото А-15 :), не самых удачных, но... Идея проста - фото отправляются на сервер, там обрабатываются (а поскольку сервер - в штатах,
то естественно все фото ASхх-хх-ххххх обрабатываются под присмотром агентов насы), обратно возвращается готовая сцена (для моих фото на все ушло
Оказалось, что железная машина нахреначила под две тыщи маркеров, на глазок половину-треть из которых использовала для калибровки; все снимки посадила на одну камеру (хз-хз...) с разными фокусными. Сцена сошлась с погрешностью 0 (прописью - нуль) пикселов по каждому из снимков.
Майя сцену ест, но с мешами и текстурами пока не разобрался.
Резюме - весьма перспективно, хотя нюансы небесспорны.
Влад, рекомендую.
Попробовал покрутить. Забавно.
Поставил (линк, нужна формальная регистрация, если уже есть то можно через прямой линк) Загрузил 4 первых попавшихся фото А-15 :), не самых удачных, но... Идея проста - фото отправляются на сервер, там обрабатываются (а поскольку сервер - в штатах,

то естественно все фото ASхх-хх-ххххх обрабатываются под присмотром агентов насы), обратно возвращается готовая сцена (для моих фото на все ушло
Оказалось, что железная машина нахреначила под две тыщи маркеров, на глазок половину-треть из которых использовала для калибровки; все снимки посадила на одну камеру (хз-хз...) с разными фокусными. Сцена сошлась с погрешностью 0 (прописью - нуль) пикселов по каждому из снимков.
Майя сцену ест, но с мешами и текстурами пока не разобрался.
Резюме - весьма перспективно, хотя нюансы небесспорны.
Влад, рекомендую.
N.A.> Влад, рекомендую.
Буду пробовать. Но вряд ли в ближайший месяц - у меня намечается сумасшедший дом и куча всяких дел. Где-то с июля смогу нормально функционировать.
Буду пробовать.
Но вряд ли в ближайший месяц - у меня намечается сумасшедший дом и куча всяких дел. Где-то с июля смогу нормально функционировать.
Кстати, пара заметок. Многочисленные опыты показывали, что даже десяток снимков с более-менее одного направления могут давать достаточно значительную погрешность по дальности. Ключ к высокой точности определения координат объектов - пары снимков с возможно бОльшего углового расстояния между ними, в идеале - с полукруга или даже с круга.
Также проблемой может быть то, что фокусное расстояние камер нельзя задавать вручную. Опыт показывает, что погрешность фокусного расстояния в несколько долей мм (например, из-за неправильной оценки фокусировочной дистанции) может сместить камеру на десятки сантиметров вдоль ее азимута (камера 5883 в моей сцене А-11 тому пример). Причем на ограниченной сцене это смещение даже не скажется на точности калибровки, т. е. пройдет незамеченным. Посмотрите, в Вашем опыте какие фокусные расстояния были назначены камерам машинкой?
Я черепашьими шагами, мало-помалу продвигаюсь по А-12, поставив первой задачей полный охват всех 6 панорам (но так как в каждой - под 20 снимков, то на первом этапе беру снимки через один). Как ни странно, при таком обилии снимков все равно проблемы с отсутствием желаемого ракурса - обычное дело. Но, может быть, удастся завершить все панорамы. Дальше думал изменить стратегию, в сравнении с А-11. Полная сцена все равно невозможна, поэтому думаю взять сцену с полными панорамами "через один" за базовую, а потом на ее основе делать ограниченные сцены, добавляя к базовой по десятку-другому камер (доводя число снимков в сцене до ~80 - 90), а затем возвращаться к базовой сцене и на ее основе делать новую, добавляя уже другие два десятка камер. Полная сцена, таким образом, будет обеспечивать более-менее подходящую начальную точность (т. к. имеет круговой охват из нескольких точек), и сцены на ее основе будут уже вполне стабильны. Затем все сцены можно будет комбинировать в одну общую, усредняя по сценам положение каждой камеры, которая имеется в нескольких сценах одновременно (т. е. камер базовой сцены). Это позволит разумным трудом построить более-менее представительную сцену из множества камер. Но это дело будущего.
Также проблемой может быть то, что фокусное расстояние камер нельзя задавать вручную. Опыт показывает, что погрешность фокусного расстояния в несколько долей мм (например, из-за неправильной оценки фокусировочной дистанции) может сместить камеру на десятки сантиметров вдоль ее азимута (камера 5883 в моей сцене А-11 тому пример). Причем на ограниченной сцене это смещение даже не скажется на точности калибровки, т. е. пройдет незамеченным. Посмотрите, в Вашем опыте какие фокусные расстояния были назначены камерам машинкой?
Я черепашьими шагами, мало-помалу продвигаюсь по А-12, поставив первой задачей полный охват всех 6 панорам (но так как в каждой - под 20 снимков, то на первом этапе беру снимки через один). Как ни странно, при таком обилии снимков все равно проблемы с отсутствием желаемого ракурса - обычное дело. Но, может быть, удастся завершить все панорамы. Дальше думал изменить стратегию, в сравнении с А-11. Полная сцена все равно невозможна, поэтому думаю взять сцену с полными панорамами "через один" за базовую, а потом на ее основе делать ограниченные сцены, добавляя к базовой по десятку-другому камер (доводя число снимков в сцене до ~80 - 90), а затем возвращаться к базовой сцене и на ее основе делать новую, добавляя уже другие два десятка камер. Полная сцена, таким образом, будет обеспечивать более-менее подходящую начальную точность (т. к. имеет круговой охват из нескольких точек), и сцены на ее основе будут уже вполне стабильны. Затем все сцены можно будет комбинировать в одну общую, усредняя по сценам положение каждой камеры, которая имеется в нескольких сценах одновременно (т. е. камер базовой сцены). Это позволит разумным трудом построить более-менее представительную сцену из множества камер. Но это дело будущего.
N.A.>> Влад, рекомендую.
Посмотрел их ролики - рекомендации по съемкам. Да, это все прекрасно. Но с лунными снимками у нас проблема. Их не снимали так, как они рекомендуют. У нас сотни снимков, но нет и доли того покрытия, который они советуют обеспечить. Это и для меня одна из самых больших проблем. Надо, конечно, проверить, как будет автомат работать с тем, что есть. Может, сможет такое кушать. Обязательно надо проверить. Но я не удивлюсь, если машинка столкнется с проблемой недостаточного покрытия, недостаточного количества ракурсов. И никудышного освещения. Снимки против солнца и снимки по солнцу - самое скверное, особенно по солнцу (ноль контраста, оппозиционный эффект, минимум теней, фиг что разберешь...).
Но пробовать стОит.
Посмотрел их ролики - рекомендации по съемкам. Да, это все прекрасно. Но с лунными снимками у нас проблема. Их не снимали так, как они рекомендуют.
У нас сотни снимков, но нет и доли того покрытия, который они советуют обеспечить. Это и для меня одна из самых больших проблем. Надо, конечно, проверить, как будет автомат работать с тем, что есть. Может, сможет такое кушать. Обязательно надо проверить. Но я не удивлюсь, если машинка столкнется с проблемой недостаточного покрытия, недостаточного количества ракурсов. И никудышного освещения. Снимки против солнца и снимки по солнцу - самое скверное, особенно по солнцу (ноль контраста, оппозиционный эффект, минимум теней, фиг что разберешь...).Но пробовать стОит.
7-40> Также проблемой может быть то, что фокусное расстояние камер нельзя задавать вручную. Опыт показывает, что погрешность фокусного расстояния в несколько долей мм (например, из-за неправильной оценки фокусировочной дистанции) может сместить камеру на десятки сантиметров
Да, есть такое дело.
Я покопался в тексте оного rzi - получилось вот что: главную точку автомат подбирать не захотел, предпочел поиграть фокусными и дисторсией для каждого снимка. Понятно, что он не знал физических размеров кадра, посему я на полученные значения фокусных смотреть не стал, но вот добытые из rzi значения FOV - если я что-нибудь в чем-нибудь понимаю - оказались обескураживающими:
>
>
>
>
>
>
>
>
>
А на деле для (этих) alsj-шных кропов горизонтальный FOV ~ 45.8. Кошмар. Видимо остальное железная машина "подрихтовала" ориентацией камер и дисторсией (последняя к слову тоже скачет от снимка к снимку ).
И - довесок к кошмару - я не нашел в rzi значений результирующих погрешностей => скорее всего PSE их просто-напросто не экспортировал, на основании чего IM и нарисовал радующие глаз "зелень" и нулевые погрешности по всем снимкам и маркерам...
Впрочем, еще покопаюсь.
N.A.>>> Влад, рекомендую.
7-40> У нас сотни снимков, но нет и доли того покрытия, который они советуют обеспечить.
Ну, у нас и задачка попроще, чем отрисовать строение со всех сторон мешами с текстурами. Фактура, правда - посложнее. Но если повезет, и автомат Photofly сможет более-менее качественно расставлять основную массу маркеров - то скорее всего потом можно будет доработать результирующую сцену напильником в IM. Если совместимость по rzi оставят.
Да, есть такое дело.
Я покопался в тексте оного rzi - получилось вот что: главную точку автомат подбирать не захотел, предпочел поиграть фокусными и дисторсией для каждого снимка. Понятно, что он не знал физических размеров кадра, посему я на полученные значения фокусных смотреть не стал, но вот добытые из rzi значения FOV - если я что-нибудь в чем-нибудь понимаю - оказались обескураживающими:
>
>
>
>
>
>
>
>
>
А на деле для (этих) alsj-шных кропов горизонтальный FOV ~ 45.8. Кошмар. Видимо остальное железная машина "подрихтовала" ориентацией камер и дисторсией (последняя к слову тоже скачет от снимка к снимку
).И - довесок к кошмару - я не нашел в rzi значений результирующих погрешностей => скорее всего PSE их просто-напросто не экспортировал, на основании чего IM и нарисовал радующие глаз "зелень" и нулевые погрешности по всем снимкам и маркерам...
Впрочем, еще покопаюсь.
N.A.>>> Влад, рекомендую.
7-40> У нас сотни снимков, но нет и доли того покрытия, который они советуют обеспечить.
Ну, у нас и задачка попроще, чем отрисовать строение со всех сторон мешами с текстурами. Фактура, правда - посложнее. Но если повезет, и автомат Photofly сможет более-менее качественно расставлять основную массу маркеров - то скорее всего потом можно будет доработать результирующую сцену напильником в IM. Если совместимость по rzi оставят.
Это сообщение редактировалось 03.06.2011 в 12:51
N.A.> Я покопался в тексте оного rzi - получилось вот что: главную точку автомат подбирать не захотел, предпочел поиграть фокусными и дисторсией для каждого снимка. Понятно, что он не знал физических размеров кадра, посему я на полученные значения фокусных смотреть не стал, но вот добытые из rzi значения FOV - если я что-нибудь в чем-нибудь понимаю - оказались обескураживающими:
...
N.A.> А на деле для (этих) alsj-шных кропов горизонтальный FOV ~ 45.8. Кошмар. Видимо остальное железная машина "подрихтовала" ориентацией камер и дисторсией (последняя к слову тоже скачет от снимка к снимку ).
Это оно самое и есть. При таком раскладе он может по 4-м снимкам неплохо смоделировать положение объектов по полю, подобрав дисторсию и фокусное, но положения камер будут содержать очень большие ошибки. Машинке ведь на камеры плевать, а в нашем случае фактически нахождение камер и есть одна из главных задач.
N.A.> Ну, у нас и задачка попроще, чем отрисовать строение со всех сторон мешами с текстурами. Фактура, правда - посложнее. Но если повезет, и автомат Photofly сможет более-менее качественно расставлять основную массу маркеров - то скорее всего потом можно будет доработать результирующую сцену напильником в IM. Если совместимость по rzi оставят.
Есть такое дело, что с IM доработать чего-то уже невозможно или почти невозможно, если не доработано сразу. Нужно с самого начала исправлять все ошибки, потом он уже не даст. И у нас задача не то, что проще - она другая. У них задача отрисовать текстуры, т. е. определить положение точек (хоть и большого числа) в достаточно ограниченной области пространства. Нам же требуется не очень много точек (всего-то десятки-сотни ), но в очень больших пределах, от метров до сотен метров, и положения камер с точностью лучше полуметра, желательно 10 см.
Поэтому нам действительно нужно ТОЧНО отобразить положение (и ориентацию) камер, компенсация одного (неточного фокусного) другим (подобранными коэффициентами дисторсии) нас устроить не могут... А игра дисторсиями, как я заметил, очень даже способна улучшить сходимость. Помнится, отснял Казанскую обсерваторию мыльницей с трансфокатором, попробовал свести снимки без дисторсии - 3-4 получаются, дальше все плохо. Уже махнул рукой, потом вспомнил про возможность дать IM найти дисторсии. Установил их переменными. Фьюить! Всё желтое и красное мигом сменилось радующей глаз зеленью, сходимость оказалась расчудесной. Остался только вопрос: здание-то, может, отмоделировалось и точно; но вот с какой погрешностью были найдены положения камеры? К сожалению, проверить это было уже нельзя. Надо бы попробовать поэкспериментировать где-нибудь на натуре с отмеченными при съемке положениями камер. ....Но для Луны я ставлю фокусные по оцененной дистации фокусировки, а дисторсии ставлю в ноль.
...
N.A.> А на деле для (этих) alsj-шных кропов горизонтальный FOV ~ 45.8. Кошмар. Видимо остальное железная машина "подрихтовала" ориентацией камер и дисторсией (последняя к слову тоже скачет от снимка к снимку
).Это оно самое и есть.
При таком раскладе он может по 4-м снимкам неплохо смоделировать положение объектов по полю, подобрав дисторсию и фокусное, но положения камер будут содержать очень большие ошибки. Машинке ведь на камеры плевать, а в нашем случае фактически нахождение камер и есть одна из главных задач.N.A.> Ну, у нас и задачка попроще, чем отрисовать строение со всех сторон мешами с текстурами. Фактура, правда - посложнее. Но если повезет, и автомат Photofly сможет более-менее качественно расставлять основную массу маркеров - то скорее всего потом можно будет доработать результирующую сцену напильником в IM. Если совместимость по rzi оставят.
Есть такое дело, что с IM доработать чего-то уже невозможно или почти невозможно, если не доработано сразу. Нужно с самого начала исправлять все ошибки, потом он уже не даст. И у нас задача не то, что проще - она другая. У них задача отрисовать текстуры, т. е. определить положение точек (хоть и большого числа) в достаточно ограниченной области пространства. Нам же требуется не очень много точек (всего-то десятки-сотни
), но в очень больших пределах, от метров до сотен метров, и положения камер с точностью лучше полуметра, желательно 10 см.Поэтому нам действительно нужно ТОЧНО отобразить положение (и ориентацию) камер, компенсация одного (неточного фокусного) другим (подобранными коэффициентами дисторсии) нас устроить не могут... А игра дисторсиями, как я заметил, очень даже способна улучшить сходимость. Помнится, отснял Казанскую обсерваторию мыльницей с трансфокатором, попробовал свести снимки без дисторсии - 3-4 получаются, дальше все плохо. Уже махнул рукой, потом вспомнил про возможность дать IM найти дисторсии. Установил их переменными. Фьюить! Всё желтое и красное мигом сменилось радующей глаз зеленью, сходимость оказалась расчудесной. Остался только вопрос: здание-то, может, отмоделировалось и точно; но вот с какой погрешностью были найдены положения камеры? К сожалению, проверить это было уже нельзя.
Надо бы попробовать поэкспериментировать где-нибудь на натуре с отмеченными при съемке положениями камер. ....Но для Луны я ставлю фокусные по оцененной дистации фокусировки, а дисторсии ставлю в ноль.
N.A.> Впрочем, еще покопаюсь.
И покопался...
7-40> Есть такое дело, что с IM доработать чего-то уже невозможно
Хотел было поспорить, но... Еще одна печальная деталь - Photofly экспортирует в rzi только реконструированные 3D координаты, а 2D-координаты расставленных им точек на снимках утаивает - показывает только те, что добавлены вручную. А жаль...
7-40> Поэтому нам действительно нужно ТОЧНО отобразить положение (и ориентацию) камер, компенсация одного (неточного фокусного) другим (подобранными коэффициентами дисторсии) нас устроить не могут...
Ну так - само собой.
Еще один тест-драйв Photofly на практически идеальной последовательности.




Автомат работает предивно - например, если просто закинуть эти фото на сервер, указать как бэ правильное ФР=61,1 и позволить железной машине додумать детали, то выйдет что-то вроде:

Прелестный результат, согласитесь - афера! афера! экран! экран!
А на самом деле - если учесть, что ФР задается (кто бы мог подумать ) в 35-мм эквиваленте, при этом заметить, что если фото закидываются группой, а потом переназначаются по камерам, то результат установки ФР (загадочным образом) оказывается неправильным, в отличии от того, что выходит при добавлению фото по одному; и в довершении ко всему установить в rzi правильные значения главных точек, то результат будет уже посимпатичнее:

Интересно, что Photofly после фиксации ФР вообще перестал рисовать меши на В.Массиве - скорее всего, смекнул, что дело это безнадежное при относительно малой стереобазе.
А вот отвадить железную машину играть дисторсией у меня не получилось - соответствующие теги из rzi - он судя по всему цинично игнорирует.
В общем и целом - не так уж и плохо, работать поудобнее, чем в IM, но убивает отсутствие количественного критерия качества результирующей сцены и удручает то, что ломаной версии по-видимому не будет никогда.
До измерения расстояний руки пока не дошли.
UPD. Длина перекладины флага получилась автоматом 1.2 м (а на деле емнип ~так и есть), при этом точки на склонах В.Массива реконструировались на дальностях от 2.5 до 6 км:

И покопался...
7-40> Есть такое дело, что с IM доработать чего-то уже невозможно
Хотел было поспорить, но... Еще одна печальная деталь - Photofly экспортирует в rzi только реконструированные 3D координаты, а 2D-координаты расставленных им точек на снимках утаивает - показывает только те, что добавлены вручную. А жаль...
7-40> Поэтому нам действительно нужно ТОЧНО отобразить положение (и ориентацию) камер, компенсация одного (неточного фокусного) другим (подобранными коэффициентами дисторсии) нас устроить не могут...
Ну так - само собой.
Еще один тест-драйв Photofly на практически идеальной последовательности.




Автомат работает предивно - например, если просто закинуть эти фото на сервер, указать как бэ правильное ФР=61,1 и позволить железной машине додумать детали, то выйдет что-то вроде:
Прелестный результат, согласитесь - афера! афера! экран! экран!
А на самом деле - если учесть, что ФР задается (кто бы мог подумать
) в 35-мм эквиваленте, при этом заметить, что если фото закидываются группой, а потом переназначаются по камерам, то результат установки ФР (загадочным образом) оказывается неправильным, в отличии от того, что выходит при добавлению фото по одному; и в довершении ко всему установить в rzi правильные значения главных точек, то результат будет уже посимпатичнее:Интересно, что Photofly после фиксации ФР вообще перестал рисовать меши на В.Массиве - скорее всего, смекнул, что дело это безнадежное при относительно малой стереобазе.
А вот отвадить железную машину играть дисторсией у меня не получилось - соответствующие теги из rzi - он судя по всему цинично игнорирует.
В общем и целом - не так уж и плохо, работать поудобнее, чем в IM, но убивает отсутствие количественного критерия качества результирующей сцены и удручает то, что ломаной версии по-видимому не будет никогда.
До измерения расстояний руки пока не дошли.
UPD. Длина перекладины флага получилась автоматом 1.2 м (а на деле емнип ~так и есть), при этом точки на склонах В.Массива реконструировались на дальностях от 2.5 до 6 км:
Это сообщение редактировалось 05.06.2011 в 18:19
7-40> Короче, с А-12 все стало получаться. Причем первые 30 снимков стали на свои места с удивительной скоростью и точностью. Дальше все не так приятно, но только из-за багов IM, который отказывается калибровать в совершенно невинных ситуациях. Но в целом все выглядит обещающе. Времени заниматься А-12 вплотную у меня нет, но шесть панорам вблизи ЛМ готовы примерно на треть. Может быть, как-нибудь когда-нибудь удастся их завершить мало-помалу. Начальный план - сделать эти 6 панорам (в сумме около 120 снимков).
Уфф, заняться А-12 как следует до сих пор не удавалось, все не как у людей. В феврале сделал сцену на 42 камеры (только 6 панорам вблизи ЛМ), потом понял, что панорамами не обойдешься. В апреле взялся снова, но потом дела отвлекли. По ходу дела заметил, что сканы в Apollo Image Atlas имеют некоторое поперечное сжатие (определил по крестам) порядка 0,2 %. Вроде, немного, а при 3900 пикселях сторона это все-таки выражается числом в несколько пикселей. Теперь буду указывать ImageModeler-у для каждой камеры точный размер кадра (до сих пор пользовался общим средним для всех), надеюсь, это повысит точность.
Сейчас приступил снова с нуля. По-прежнему первая задача - покрыть все 6 панорам около ЛМ. Конрад бяка, запорол 3 панорамы, пришлось Бину переделывать, а мне теперь со всеми шестью страдай. Поскольку в каждой панораме по паре десятков снимков (куда им столько фоткать было?), решил действовать по следующему плану.
Сначала - все 6 панорам, беря кадры через один. Это даст ок. шести десятков снимков, приемлемо. В добавок к панорамам брать, где нужно для лучших параллаксов и уверенных отождествлений, дополнительные камеры - виды из окон, виды издали и т. п. Но не более, чем минимально необходимо. Когда все панорамы таким образом будут сделаны, в сцене будет полный охват местности вблизи ЛМ.
Полученную сцену можно брать за основу. На ее базе построить несколько более полных сцен: скажем, основа + снимки, заполняющие полностью пару панорам; основа + заполнение другой пары панорам; основа + прочие снимки вблизи ЛМ; основа + снимки у ALSEP; и так далее. Так можно будет сделать несколько отдельных сцен, связанных общей основой. Это позволит избежать построения одной гигантской сцены - ImageModeler гигантские сцены почти не держит, когда я в А-11 завершил сцену на 121-м снимке, он уже был на грани стабильности. Работа с такими сценами - это не работа, а борьба. С несколькими средними сценами дело будет идти гораздо лучше.
При построении карты сцены можно будет объединить, в принципе это не сложно. Если камера или иной объект присутствуют на нескольких подсценах (а такие непременно будут, раз основа у всех сцен общая), то их координаты на карте можно брать как среднее. Это и точность, наверное, позволит повысить.
Таким образом куда-нибудь можно будет двигаться потихоньку, может быть, когда-нибудь удастся и более-менее репрезентативную карту сделать. Ну а пока есть комбинация из двух первых попыток, Approximate (not precise) graphical combination of the two va... on Twitpic , в ней около 60 камер (скомбинировал обе попытки простым графическим наложением; это не самый точный метод, некоторые положения камер могут содержать погрешность вплоть до полуметра, но это все равно склейка двух черновиков); и есть новая сцена в пока очень ограниченном составе 18 камер 4 more cameras have been added, the new scene contains now 18... on Twitpic . Надеюсь, это только начало, так что будет хватать времени и желания потихоньку этим делом заниматься.
P.S. Ради оперативности решил выкладывать результаты на twitter, вроде, так вполне удобно в одном месте все хранить и комментарий писать.
Уфф, заняться А-12 как следует до сих пор не удавалось, все не как у людей.
В феврале сделал сцену на 42 камеры (только 6 панорам вблизи ЛМ), потом понял, что панорамами не обойдешься. В апреле взялся снова, но потом дела отвлекли. По ходу дела заметил, что сканы в Apollo Image Atlas имеют некоторое поперечное сжатие (определил по крестам) порядка 0,2 %. Вроде, немного, а при 3900 пикселях сторона это все-таки выражается числом в несколько пикселей. Теперь буду указывать ImageModeler-у для каждой камеры точный размер кадра (до сих пор пользовался общим средним для всех), надеюсь, это повысит точность.Сейчас приступил снова с нуля. По-прежнему первая задача - покрыть все 6 панорам около ЛМ. Конрад бяка, запорол 3 панорамы, пришлось Бину переделывать, а мне теперь со всеми шестью страдай.
Поскольку в каждой панораме по паре десятков снимков (куда им столько фоткать было?), решил действовать по следующему плану.Сначала - все 6 панорам, беря кадры через один. Это даст ок. шести десятков снимков, приемлемо. В добавок к панорамам брать, где нужно для лучших параллаксов и уверенных отождествлений, дополнительные камеры - виды из окон, виды издали и т. п. Но не более, чем минимально необходимо. Когда все панорамы таким образом будут сделаны, в сцене будет полный охват местности вблизи ЛМ.
Полученную сцену можно брать за основу. На ее базе построить несколько более полных сцен: скажем, основа + снимки, заполняющие полностью пару панорам; основа + заполнение другой пары панорам; основа + прочие снимки вблизи ЛМ; основа + снимки у ALSEP; и так далее. Так можно будет сделать несколько отдельных сцен, связанных общей основой. Это позволит избежать построения одной гигантской сцены - ImageModeler гигантские сцены почти не держит, когда я в А-11 завершил сцену на 121-м снимке, он уже был на грани стабильности. Работа с такими сценами - это не работа, а борьба. С несколькими средними сценами дело будет идти гораздо лучше.
При построении карты сцены можно будет объединить, в принципе это не сложно. Если камера или иной объект присутствуют на нескольких подсценах (а такие непременно будут, раз основа у всех сцен общая), то их координаты на карте можно брать как среднее. Это и точность, наверное, позволит повысить.
Таким образом куда-нибудь можно будет двигаться потихоньку, может быть, когда-нибудь удастся и более-менее репрезентативную карту сделать. Ну а пока есть комбинация из двух первых попыток, Approximate (not precise) graphical combination of the two va... on Twitpic , в ней около 60 камер (скомбинировал обе попытки простым графическим наложением; это не самый точный метод, некоторые положения камер могут содержать погрешность вплоть до полуметра, но это все равно склейка двух черновиков); и есть новая сцена в пока очень ограниченном составе 18 камер 4 more cameras have been added, the new scene contains now 18... on Twitpic . Надеюсь, это только начало, так что будет хватать времени и желания потихоньку этим делом заниматься.
P.S. Ради оперативности решил выкладывать результаты на twitter, вроде, так вполне удобно в одном месте все хранить и комментарий писать.
 Дядюшка ВB.
Дядюшка ВB.

Влад, а вот каков, так сказать, желаемый конечный результат соединения, скажем, этих панорам и построения одной карты? Что получится в конце и зачем оно? Что можно будет с ним делать и для чего использовать? Я спрашиваю по тупости, ибо если фотографией и увлекаюсь, то в фотограмметрии не в зуб ногой
Конечная задача - оформление чего-то вроде этого: Apollo 11 Photogrammetry . Идентификация артефактов и прочих камней на поверхности, установление их взаимного положения, определение мест, откуда эта парочка делала те или иные снимки. В конце концов, сама карта камер пока что существует только для А-11, а для других полетов ничего подобного нет. Значит, даже неполная карта уже может представлять интерес.
Понятно. Хотя, в задачу наверное также входит проверка, насколько точно аферисты насыпали песочницу
Д.В.> Понятно. Хотя, в задачу наверное также входит проверка, насколько точно аферисты насыпали песочницу
Нет, уже давно не входит. Я вполне доволен результатом по А-11, это позволяет мрачно глумиться над всякими-разными. Все остальные экспедиции идут уже из чистого интереса.
Нет, уже давно не входит.
Я вполне доволен результатом по А-11, это позволяет мрачно глумиться над всякими-разными. Все остальные экспедиции идут уже из чистого интереса.
7-40> Сейчас приступил снова с нуля. По-прежнему первая задача - покрыть все 6 панорам около ЛМ. Конрад бяка, запорол 3 панорамы, пришлось Бину переделывать, а мне теперь со всеми шестью страдай. Поскольку в каждой панораме по паре десятков снимков (куда им столько фоткать было?), решил действовать по следующему плану.
7-40> Сначала - все 6 панорам, беря кадры через один. Это даст ок. шести десятков снимков, приемлемо. В добавок к панорамам брать, где нужно для лучших параллаксов и уверенных отождествлений, дополнительные камеры - виды из окон, виды издали и т. п. Но не более, чем минимально необходимо. Когда все панорамы таким образом будут сделаны, в сцене будет полный охват местности вблизи ЛМ.
7-40> Полученную сцену можно брать за основу.
Ура. Задача-минимум выполнена. Все 6 панорам помаплены (камера через одну), так что около ЛМ получен полный охват на 360 градусов со всех точек. Карта:

View full size
135
126 days ago
Finally, the basic camera stations map of the Apollo 12 landing site is ready! This map was compiled photogrammetrically, it includes 74 camera stations, most of them within 6 near-LM panoramas. 4 camera stations are inside the LM, 2 stations are near the ALSEP site, 2 near SWC experiment, 1 near the Surveyor III, 1 on the southern rim of the Surveyor crater, about 200 m far from the LM. The map also includes the flag, the SWC experiment, the TV camera and the deployed S-band antenna, all features are drawn and oriented in their actual scale.
// Дальше —
twitpic.com
Центральный фрагмент карты около ЛМ, с панорамами, флагом, ТВ-камерой, SWC и антенной-зонтиком:
View full size
60
126 days ago
The phtogrammetrical map of the vicinity of the Apollo 12 lunar module. The LM, 6 panoramas, SWC, TV, flag and S-band antenna are present in this fragment.
0 Comments
…
// Дальше —
twitpic.com
Кроме панорамных камер, для лучшего параллакса взял несколько удаленных камер (1 у "Сервейера", 2 у ALSEP). Всего 73 камеры (на карте добавлена еще одна, 74-я) Рекордная дальность - камера в 200 метрах от ЛМ на южном валу кратера Сервейер.
Посмотрю, что дальше с этим делать.
Поскольку в каждой панораме по паре десятков снимков (куда им столько фоткать было?), решил действовать по следующему плану.7-40> Сначала - все 6 панорам, беря кадры через один. Это даст ок. шести десятков снимков, приемлемо. В добавок к панорамам брать, где нужно для лучших параллаксов и уверенных отождествлений, дополнительные камеры - виды из окон, виды издали и т. п. Но не более, чем минимально необходимо. Когда все панорамы таким образом будут сделаны, в сцене будет полный охват местности вблизи ЛМ.
7-40> Полученную сцену можно брать за основу.
Ура. Задача-минимум выполнена. Все 6 панорам помаплены (камера через одну), так что около ЛМ получен полный охват на 360 градусов со всех точек. Карта:

Finally, the basic camera stations map of the Apollo 12 landing site is ready! This map was compiled photogrammetrically, it includes 74 camera stations, most of them within 6 near-LM panoramas. 4 camera stations are inside the LM, 2 stations are near the ALSEP site, 2 near SWC experiment, 1 near the Surveyor III, 1 on the southern rim of the Surveyor crater, about 200 m far from the LM. The map also includes the flag, the SWC experiment, the TV camera and the deployed S-band antenna, all features are drawn and oriented in their actual scale. About 260 calibration benchmarks are used for photogrammetry, the total number of benchmarks is nearly 300. The accuracy of the map is estimated to be several cm in the 30-meters proximity of the LM. This scene will be used as the base for further mapping of cameras, artifacts and natural features within the Apollo 12 landing site.
Rotate photoView full size
135
126 days ago
Finally, the basic camera stations map of the Apollo 12 landing site is ready! This map was compiled photogrammetrically, it includes 74 camera stations, most of them within 6 near-LM panoramas. 4 camera stations are inside the LM, 2 stations are near the ALSEP site, 2 near SWC experiment, 1 near the Surveyor III, 1 on the southern rim of the Surveyor crater, about 200 m far from the LM. The map also includes the flag, the SWC experiment, the TV camera and the deployed S-band antenna, all features are drawn and oriented in their actual scale.
// Дальше —
twitpic.com
Центральный фрагмент карты около ЛМ, с панорамами, флагом, ТВ-камерой, SWC и антенной-зонтиком:

The phtogrammetrical map of the vicinity of the Apollo 12 lunar module. The LM, 6 panoramas, SWC, TV, flag and S-band antenna are present in this fragment.
Rotate photoView full size
60
126 days ago
The phtogrammetrical map of the vicinity of the Apollo 12 lunar module. The LM, 6 panoramas, SWC, TV, flag and S-band antenna are present in this fragment.
0 Comments
…
// Дальше —
twitpic.com
Кроме панорамных камер, для лучшего параллакса взял несколько удаленных камер (1 у "Сервейера", 2 у ALSEP). Всего 73 камеры (на карте добавлена еще одна, 74-я) Рекордная дальность - камера в 200 метрах от ЛМ на южном валу кратера Сервейер.
Посмотрю, что дальше с этим делать.
Это сообщение редактировалось 21.09.2011 в 00:41
7-40> Посмотрю, что дальше с этим делать.
Подcмотрел на суперновуме инфо (почти) в тему:
Подcмотрел на суперновуме инфо (почти) в тему:
К Адоб Премьер/Афтер Эффектс есть примочка, которая позволяет из обычного фильма автоматически сделать 3Д фильм. Алгоритм создания 3Д заключается в оценке изменений последовательности кадров и построении планов ближних и дальних на основе изменений характеристик изображения (освещение, резкость, плотность цвета). Особенно хорошо строится 3Д изображение при съемке движущейся камерой. Результатом работы программ являются два потока (анаглифа), для левого и правого глаза, которые потом можно реализовать в любой системе стерео-кино, типа, что смотрят в 2-цветных очках.
Сделал эксперимент - перевел в 3Д три фильма: 1) Труфальдино из Бергамо, 2) Форест Гамп и 3) 5-й элемент.
...
Осталось проделать эти эксперименты со съемками с Ровера, которые ОЧЕНЬ хорошего качества, и все задники повылазят. Если они были.
Copyright © Balancer 1997..2024
Создано 23.01.2010
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 23.01.2010
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}