 Татарин
Татарин

 инфо
инфо инструменты
инструменты Anika
Anika

 a_centaurus
a_centaurus


 Ckona
Ckona

 GOGI
GOGI


 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
/1101553-item_2413.jpg)
Сервопривод с обратной связью
Теги:
A.M.> Насчет относительно скорой "смерти" потенциометра иллюзий не испытываю, а насчет оптического датчика картинку в студию с комментариями, идея интересна.
Сори, фото не будет: датчик в приборе, прибор - уж десять лет как в работе. :\
Но идея очень простая: тот же енкодер, только вместо контактов - линейка фотодиодов, один красный светодиод сверху с рассеивателем из проклеенного картона, между ними - кругляш.
Сори, фото не будет: датчик в приборе, прибор - уж десять лет как в работе. :\
Но идея очень простая: тот же енкодер, только вместо контактов - линейка фотодиодов, один красный светодиод сверху с рассеивателем из проклеенного картона, между ними - кругляш.
...А неубитые медведи делили чьи-то шкуры с шумом.
Боюсь, мы поздно осознали, к чему всё это приведёт.


Татарин> Минус только один вижу: светодиод энергию жрёт. Миллиампер 20. Для устройств "от батарейки" может быть критично.
20 мА - это типовой максимальный ток для ширпотребных ярких светиков.
Для работы в тёмной коробочке - и миллиампера должно хватить.
Или ещё меньше, если фотики потянут")
20 мА - это типовой максимальный ток для ширпотребных ярких светиков.
Для работы в тёмной коробочке - и миллиампера должно хватить.
Или ещё меньше, если фотики потянут
Когда говорит масло - пушки молчат. А голос пушек - это голос Муз. (c)Ю.Шерман


.
Когда говорит масло - пушки молчат. А голос пушек - это голос Муз. (c)Ю.Шерман

A.M.> Я думаю для задачи Центауруса мое решение на данных компонентах не подходит - у него второй случай, где нужен точный градус.
Я думаю, что это не так. Прикинуть можно (и желательно, оставаясь в рамках коммерческих комплектующих). Всё-таки речь идёт о наводке по визуальному каналу. Оператор может сам выбрать скорость нацеливания и сопровождения/фиксации (в статическом случае) оптического ствола камеры. Важна здесь скорость и точность "ответа" (responce) системы на команду оператора. Грубо говоря пулемётная турель с дистанционным управлением по углам.
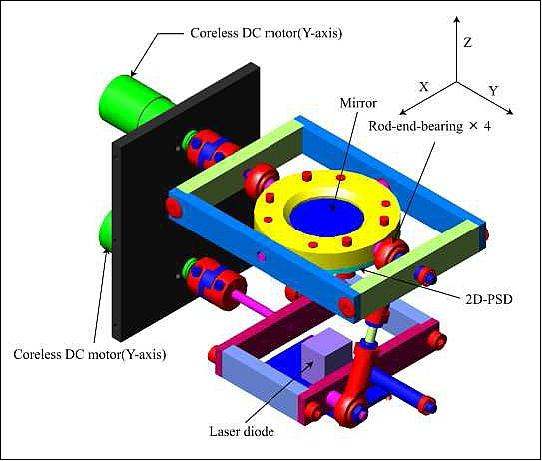
Замечу, что в случае орбиты всё сложнее. Нужно готовить съёмку нацеливанием всей платформы на нужную матрицу координат, используя только данные телеметрии. На том уровне визуального канала on-line не будет. Вот несколько изображений: такая система активаторов предполагается для японского микросат. Для линии связи на лазере. А Imager может дать представление о геометрии прототипа камеры, о которой шла речь выше.
Я думаю, что это не так. Прикинуть можно (и желательно, оставаясь в рамках коммерческих комплектующих). Всё-таки речь идёт о наводке по визуальному каналу. Оператор может сам выбрать скорость нацеливания и сопровождения/фиксации (в статическом случае) оптического ствола камеры. Важна здесь скорость и точность "ответа" (responce) системы на команду оператора. Грубо говоря пулемётная турель с дистанционным управлением по углам.
Замечу, что в случае орбиты всё сложнее. Нужно готовить съёмку нацеливанием всей платформы на нужную матрицу координат, используя только данные телеметрии. На том уровне визуального канала on-line не будет. Вот несколько изображений: такая система активаторов предполагается для японского микросат. Для линии связи на лазере. А Imager может дать представление о геометрии прототипа камеры, о которой шла речь выше.

a_centaurus> А Imager может дать представление о геометрии прототипа камеры, о которой шла речь выше.
Прикреплённые файлы:
Татарин> Кругляшок с затенёнными секторами напечатал просто на лазерном принтере, в полтора сантиметра внутри корпуса помещается 10 диодов. Это разрешение 360/1024 = 0.35 градуса на отчёт.
А какой диаметр "кругляшка" ?
Если 4 сантиметра, то у тебя принтер для младшего значащего разряда должен был по наружному радиусу малевать полоски через 0,1 мм. Эта цифра вызывает сомнения.
А какой диаметр "кругляшка" ?
Если 4 сантиметра, то у тебя принтер для младшего значащего разряда должен был по наружному радиусу малевать полоски через 0,1 мм. Эта цифра вызывает сомнения.
A.M.> одно значение 360/1024 ~ 0.35 градуса
0º21´0" or 21 угл.мин. Для телескопа с FoV в 1.5º это 23% поля зрения.
0º21´0" or 21 угл.мин. Для телескопа с FoV в 1.5º это 23% поля зрения.

А не рассматривал вариант оставить родной контроллер, а снаружи поставить ту же атмегу и вытянуть из сервы 1 проводок с подвижного контакта потенциометра? Атмега управляет с помощью стандартного ШИМа (1..2 из 20 мс) сервой и получает ОС по положению на АЦМ, одной мегой8 можно управлять даже несколькими сервами.
Ckona> Если 4 сантиметра, то у тебя принтер для младшего значащего разряда должен был по наружному радиусу малевать полоски через 0,1 мм. Эта цифра вызывает сомнения.
Даёт. Правда в линейном расположении. И на пределе. Я печатал миру для теодолитных измерений.
Даёт. Правда в линейном расположении. И на пределе. Я печатал миру для теодолитных измерений.

alex_zeed> А не рассматривал вариант оставить родной контроллер, а снаружи поставить ту же атмегу и вытянуть из сервы 1 проводок с подвижного контакта потенциометра? Атмега управляет с помощью стандартного ШИМа (1..2 из 20 мс) сервой и получает ОС по положению на АЦМ, одной мегой8 можно управлять даже несколькими сервами.
Одним проводком не отделаешься нужно все три контакта от потенциометра, а вот заработает ли адекватно родной контроллер сервы при таком вмешательстве? И при этом иметь некое устройство которое будет рулить двигателем мне не надо, двигателем я должен управлять сам при этом плавно.
Одним проводком не отделаешься нужно все три контакта от потенциометра, а вот заработает ли адекватно родной контроллер сервы при таком вмешательстве? И при этом иметь некое устройство которое будет рулить двигателем мне не надо, двигателем я должен управлять сам при этом плавно.
A.M.>> одно значение 360/1024 ~ 0.35 градуса
a_centaurus> 0º21´0" or 21 угл.мин. Для телескопа с FoV в 1.5º это 23% поля зрения.
Т.е. точность подходящая или нет я не совсем понял ???
a_centaurus> 0º21´0" or 21 угл.мин. Для телескопа с FoV в 1.5º это 23% поля зрения.
Т.е. точность подходящая или нет я не совсем понял ???
a_centaurus>> 0º21´0" or 21 угл.мин. Для телескопа с FoV в 1.5º это 23% поля зрения.
A.M.> Т.е. точность подходящая или нет я не совсем понял ???
Пока нет, Макс. Представь себе, что один контролируемый шаг по одному из угловых перемещений заставит визир камеры скакнуть на 1/4 поля зрения. А мы хотим видеть обьекты с угловым разрешением в секунды.
A.M.> Т.е. точность подходящая или нет я не совсем понял ???
Пока нет, Макс. Представь себе, что один контролируемый шаг по одному из угловых перемещений заставит визир камеры скакнуть на 1/4 поля зрения. А мы хотим видеть обьекты с угловым разрешением в секунды.
Советую в качестве энкодера взять что из этого
austriamicrosystems.com/eng/Products/Magnetic-Encoders/Rotary-Encoders
я использовал их линейные энкодеры, прекрасная вещь.
austriamicrosystems.com/eng/Products/Magnetic-Encoders/Rotary-Encoders
я использовал их линейные энкодеры, прекрасная вещь.
1
GOGI> Советую в качестве энкодера взять что из этого
GOGI> austriamicrosystems.com/eng/Products/Magnetic-Encoders/Rotary-Encoders
GOGI> я использовал их линейные энкодеры, прекрасная вещь.
В перспективе надо будет переходить на что то подобное судя по тому что есть модели 12bit имеем 360/4096 ~ 0.1 град
Но это уже другой уровень вмешательства в серийный сервопривод и одним вечером не отделаешся.
GOGI> austriamicrosystems.com/eng/Products/Magnetic-Encoders/Rotary-Encoders
GOGI> я использовал их линейные энкодеры, прекрасная вещь.
В перспективе надо будет переходить на что то подобное судя по тому что есть модели 12bit имеем 360/4096 ~ 0.1 град
Но это уже другой уровень вмешательства в серийный сервопривод и одним вечером не отделаешся.
Ckona> А какой диаметр "кругляшка" ?
Где-то 4.5-5 см.
Ckona> Если 4 сантиметра, то у тебя принтер для младшего значащего разряда должен был по наружному радиусу малевать полоски через 0,1 мм. Эта цифра вызывает сомнения.
Не, я брал не чистый двоичный код,") а Грея, конечно. Для чисто двоичного, действительно, места мало было бы.
а Грея, конечно. Для чисто двоичного, действительно, места мало было бы.
Мне места в ПЗУ хватало чтоб сделать простой табличный енкодинг. Но если нужно больше бит, Греем можно кодировать лишь младшие биты (скажем, младшие 8).
УПД:
Вот, на всякий случай, принцип из картинки должен быть понятен:
Где-то 4.5-5 см.
Ckona> Если 4 сантиметра, то у тебя принтер для младшего значащего разряда должен был по наружному радиусу малевать полоски через 0,1 мм. Эта цифра вызывает сомнения.
Не, я брал не чистый двоичный код,
а Грея, конечно. Для чисто двоичного, действительно, места мало было бы.Мне места в ПЗУ хватало чтоб сделать простой табличный енкодинг. Но если нужно больше бит, Греем можно кодировать лишь младшие биты (скажем, младшие 8).
УПД:
Вот, на всякий случай, принцип из картинки должен быть понятен:
...А неубитые медведи делили чьи-то шкуры с шумом.
Боюсь, мы поздно осознали, к чему всё это приведёт.
Это сообщение редактировалось 17.03.2011 в 02:32
Anika> Или ещё меньше, если фотики потянут
Ну, хочется их напрямую подключать, всё-таки. А лишние 10 входов с усилителями-компараторами не всегда найдутся. Поэтому - для однозначности нужна-таки яркость. Хотя при слишком большой яркости тоже есть проблема (у меня была) с засветкой соседних диодов.
Ну, хочется их напрямую подключать, всё-таки. А лишние 10 входов с усилителями-компараторами не всегда найдутся. Поэтому - для однозначности нужна-таки яркость. Хотя при слишком большой яркости тоже есть проблема (у меня была) с засветкой соседних диодов.
...А неубитые медведи делили чьи-то шкуры с шумом.
Боюсь, мы поздно осознали, к чему всё это приведёт.
A.M.> Одним проводком не отделаешься нужно все три контакта от потенциометра, а вот заработает ли адекватно родной контроллер сервы при таком вмешательстве? И при этом иметь некое устройство которое будет рулить двигателем мне не надо, двигателем я должен управлять сам при этом плавно.
Три зачем? Вот тут Analog Reference Adjust говорят одного хватит. А родной контроллер этого и не заметит, мы же к этой ноге просто вход подключим, потенциал на ней не поменяется. А двигателем и контроллер сервы будет плавно рулить, если ему задание давать недалеко от текущего положения.
Ну в общем, это 2 разных метода, у каждого свои плюсы и минусы. У метода с выводом серединки потенциометра - минимум переделок сервы и отсутствие необходимости в драйвере мотора. Главное чтоб не попалась какая-нить мегакитайская серва, у которой потенциометр подключен не к питанию, а куда-нибудь в серединку генератора импульсов.
Три зачем? Вот тут Analog Reference Adjust говорят одного хватит. А родной контроллер этого и не заметит, мы же к этой ноге просто вход подключим, потенциал на ней не поменяется. А двигателем и контроллер сервы будет плавно рулить, если ему задание давать недалеко от текущего положения.
Ну в общем, это 2 разных метода, у каждого свои плюсы и минусы. У метода с выводом серединки потенциометра - минимум переделок сервы и отсутствие необходимости в драйвере мотора. Главное чтоб не попалась какая-нить мегакитайская серва, у которой потенциометр подключен не к питанию, а куда-нибудь в серединку генератора импульсов.
alex_zeed> Три зачем? Вот тут Analog Reference Adjust говорят одного хватит. А родной контроллер этого и не заметит, мы же к этой ноге просто вход подключим, потенциал на ней не поменяется.
По ссылке конкретная модель сервы, откуда уверенность что с другими производителями будет та же история.
Плавно рулить - это значит подавать определенное напряженипе на обмотки двигателя.
Родной контроллер сервы понимает только угол, а по какому закону он этого угла достигает, с плавной регулировкой или без... знает только контроллер сервы, что есть чОрный ящик.
alex_zeed> А двигателем и контроллер сервы будет плавно рулить, если ему задание давать недалеко от текущего положения.
А если надо далеко и медленно.
По ссылке конкретная модель сервы, откуда уверенность что с другими производителями будет та же история.
Плавно рулить - это значит подавать определенное напряженипе на обмотки двигателя.
Родной контроллер сервы понимает только угол, а по какому закону он этого угла достигает, с плавной регулировкой или без... знает только контроллер сервы, что есть чОрный ящик.
alex_zeed> А двигателем и контроллер сервы будет плавно рулить, если ему задание давать недалеко от текущего положения.
А если надо далеко и медленно.
A.M.> А если надо далеко и медленно.
Дать недалеко (ну например +1 градус к текущему) и подождать
Но в целом согласен, подход с проводком сильно зависит от примененной модели сервы, а учитывая что в дешевых китайских внутри одной модели может быть разное железо...
Да, а если говорить о переделке сервы - то может ее сразу по схеме openservo переделывать, с полевиками, а не с биполярным L293D? Эффективность повыше будет.
Дать недалеко (ну например +1 градус к текущему) и подождать
Но в целом согласен, подход с проводком сильно зависит от примененной модели сервы, а учитывая что в дешевых китайских внутри одной модели может быть разное железо...
Да, а если говорить о переделке сервы - то может ее сразу по схеме openservo переделывать, с полевиками, а не с биполярным L293D? Эффективность повыше будет.
A.M.>> А если надо далеко и медленно.
alex_zeed> Дать недалеко (ну например +1 градус к текущему) и подождать
Это будет делать ситема управления, представь теперь как её реализовывать и отлаживать с такими требованиями, и как реализовывать плавный поворот сервы такими маленькими шажками, я имею в виду ПО которое должно рулить таким процессом.
alex_zeed> Но в целом согласен, подход с проводком сильно зависит от примененной модели сервы, а учитывая что в дешевых китайских внутри одной модели может быть разное железо...
alex_zeed> Да, а если говорить о переделке сервы - то может ее сразу по схеме openservo переделывать, с полевиками, а не с биполярным L293D? Эффективность повыше будет.
В чем это (эффективность) выражается, если L293D специально для этих целей и заточена, что бы рулить 2-мя двигателями.
alex_zeed> Дать недалеко (ну например +1 градус к текущему) и подождать
Это будет делать ситема управления, представь теперь как её реализовывать и отлаживать с такими требованиями, и как реализовывать плавный поворот сервы такими маленькими шажками, я имею в виду ПО которое должно рулить таким процессом.
alex_zeed> Но в целом согласен, подход с проводком сильно зависит от примененной модели сервы, а учитывая что в дешевых китайских внутри одной модели может быть разное железо...
alex_zeed> Да, а если говорить о переделке сервы - то может ее сразу по схеме openservo переделывать, с полевиками, а не с биполярным L293D? Эффективность повыше будет.
В чем это (эффективность) выражается, если L293D специально для этих целей и заточена, что бы рулить 2-мя двигателями.
A.M.> Это будет делать ситема управления, представь теперь как её реализовывать и отлаживать с такими требованиями, и как реализовывать плавный поворот сервы такими маленькими шажками, я имею в виду ПО которое должно рулить таким процессом.
Не, я имел в виду не шажки по 1 градусу, а непрерывную в управляющем цикле выдачу задания на серву на 1 градус выше ее положения. Регулятор сервы при этом выдаст на моторчик ШИМ с небольшим заполнением, что вынудит ее поворачиваться медленно. Но усиленно тут спорить не буду, сам вижу, что это добавление к нашему ПИДу второго ПИ-регулятора с неизвестными характеристиками, что на управляемости вряд ли хорошо скажется.
A.M.> В чем это (эффективность) выражается, если L293D специально для этих целей и заточена, что бы рулить 2-мя двигателями.
У 293-й при максимальном токе, а это всего 0.6А, на каждом плече может падать до 1.8 вольта. Если напряжение питания невысокое, скажем 5В (это типичное питание для сервы), то на драйвере упадет 3.6В (и уйдет в тепло) и только 1.4 останется мотору... Да, при повышении питания все конечно не так драматично, поэтому 239-ю обычно используют для всяких шаговиков с питанием вольт 12, а то и 24.
А полевички можно подобрать такие, что на них менее 0.1В падать будет при паре ампер нагрузки - это выгоднее и по теплу, и по максимальному напряжению на моторе.
Хотя у 293 есть и плюс - она одна А полевиков вместо нее надо 8 штук - это раз, да еще и с всякими резисторами, да еще и все это (я имею в виду схему опенсерво) рассчитано как раз на низкое питание 5-6 вольт, а с высоким работать не будет или нужно еще 4 транзистора.
В общем, я просто напомнил, что бывает альтернатива L293D, а выбирать уже надо по совокупности факторов.
Не, я имел в виду не шажки по 1 градусу, а непрерывную в управляющем цикле выдачу задания на серву на 1 градус выше ее положения. Регулятор сервы при этом выдаст на моторчик ШИМ с небольшим заполнением, что вынудит ее поворачиваться медленно. Но усиленно тут спорить не буду, сам вижу, что это добавление к нашему ПИДу второго ПИ-регулятора с неизвестными характеристиками, что на управляемости вряд ли хорошо скажется.
A.M.> В чем это (эффективность) выражается, если L293D специально для этих целей и заточена, что бы рулить 2-мя двигателями.
У 293-й при максимальном токе, а это всего 0.6А, на каждом плече может падать до 1.8 вольта. Если напряжение питания невысокое, скажем 5В (это типичное питание для сервы), то на драйвере упадет 3.6В (и уйдет в тепло) и только 1.4 останется мотору... Да, при повышении питания все конечно не так драматично, поэтому 239-ю обычно используют для всяких шаговиков с питанием вольт 12, а то и 24.
А полевички можно подобрать такие, что на них менее 0.1В падать будет при паре ампер нагрузки - это выгоднее и по теплу, и по максимальному напряжению на моторе.
Хотя у 293 есть и плюс - она одна
А полевиков вместо нее надо 8 штук - это раз, да еще и с всякими резисторами, да еще и все это (я имею в виду схему опенсерво) рассчитано как раз на низкое питание 5-6 вольт, а с высоким работать не будет или нужно еще 4 транзистора.В общем, я просто напомнил, что бывает альтернатива L293D, а выбирать уже надо по совокупности факторов.
Это сообщение редактировалось 17.03.2011 в 19:22
A.M.>> В чем это (эффективность) выражается, если L293D специально для этих целей и заточена, что бы рулить 2-мя двигателями.
alex_zeed> У 293-й при максимальном токе, а это всего 0.6А, на каждом плече может падать до 1.8 вольта. Если напряжение питания невысокое, скажем 5В (это типичное питание для сервы), то на драйвере упадет 3.6В (и уйдет в тепло) и только 1.4 останется мотору... Да, при повышении питания все конечно не так драматично, поэтому 239-ю обычно используют для всяких шаговиков с питанием вольт 12, а то и 24.
alex_zeed> А полевички можно подобрать такие, что на них менее 0.1В падать будет при паре ампер нагрузки - это выгоднее и по теплу, и по максимальному напряжению на моторе.
Я в таких нюансах не силен... решения нахожу исходя из информации в интернете + доступность комплектующих + сложность изготовления.
Драйверов тоже масса, есть аналогичный L293D на более высокие токи . При всех перечисленных недостатках - это одна микросхема. Полевики надо подобрать, изготовить под них плату и запаять с учетом обвязки. В схемотехнике не силен, но насколько я знаю на один двигаель нужно 4 полевика, в сумме получаем 8 и это без дополнительных элементов.
С учетом того, что ты не один в этом мире и желательно, что бы твои решения мог повторить другой любитель с таким же результатом... я за простоту и доступность, пускай и не с лучшими характеристиками.
alex_zeed> У 293-й при максимальном токе, а это всего 0.6А, на каждом плече может падать до 1.8 вольта. Если напряжение питания невысокое, скажем 5В (это типичное питание для сервы), то на драйвере упадет 3.6В (и уйдет в тепло) и только 1.4 останется мотору... Да, при повышении питания все конечно не так драматично, поэтому 239-ю обычно используют для всяких шаговиков с питанием вольт 12, а то и 24.
alex_zeed> А полевички можно подобрать такие, что на них менее 0.1В падать будет при паре ампер нагрузки - это выгоднее и по теплу, и по максимальному напряжению на моторе.
Я в таких нюансах не силен... решения нахожу исходя из информации в интернете + доступность комплектующих + сложность изготовления.
Драйверов тоже масса, есть аналогичный L293D на более высокие токи . При всех перечисленных недостатках - это одна микросхема. Полевики надо подобрать, изготовить под них плату и запаять с учетом обвязки. В схемотехнике не силен, но насколько я знаю на один двигаель нужно 4 полевика, в сумме получаем 8 и это без дополнительных элементов.
С учетом того, что ты не один в этом мире и желательно, что бы твои решения мог повторить другой любитель с таким же результатом... я за простоту и доступность, пускай и не с лучшими характеристиками.
alex_zeed> В общем, я просто напомнил, что бывает альтернатива L293D, а выбирать уже надо по совокупности факторов.
Как такового решения не последовало, схемы я тоже не увидел... просто "напомнил" о некой возможности, что это можно реализовать на других принципах...
При всем уважении. Напоминать мне об этом не надо, я ничего не забыл и с памятью у меня все в порядке. Это называется иначе...
Ничего личного.
Как такового решения не последовало, схемы я тоже не увидел... просто "напомнил" о некой возможности, что это можно реализовать на других принципах...
При всем уважении. Напоминать мне об этом не надо, я ничего не забыл и с памятью у меня все в порядке. Это называется иначе...
Ничего личного.
Реклама Google — средство выживания форумов :)
A.M.> Как такового решения не последовало, схемы я тоже не увидел...
А, я как-то посчитал что названия openservo достаточно. Извиняюсь, тем более что схем там не один вариант. Я имел в виду конкретно вот эту, версии 2: Schematic2 - OpenServo Wiki. Два восьминогих корпуса полевиков и 4 резистора на канал. Ну еще правда датчик тока там интересный применен, не везде найдешь. Но там возможны варианты решения.
Версия 3 там интереснее, но уже сложнее, 6 транзисторов, 2 датчика тока, в общем совсем не для новичков.
Повторюсь, схемы на полевиках нужны для получения хорошей динамики на низких напряжениях питания. Ни в коем случае не предлагаю немедленно выкинуть 293-ю и бежать в магазин за полевиками
А, я как-то посчитал что названия openservo достаточно. Извиняюсь, тем более что схем там не один вариант. Я имел в виду конкретно вот эту, версии 2: Schematic2 - OpenServo Wiki. Два восьминогих корпуса полевиков и 4 резистора на канал. Ну еще правда датчик тока там интересный применен, не везде найдешь. Но там возможны варианты решения.
Версия 3 там интереснее, но уже сложнее, 6 транзисторов, 2 датчика тока, в общем совсем не для новичков.
Повторюсь, схемы на полевиках нужны для получения хорошей динамики на низких напряжениях питания. Ни в коем случае не предлагаю немедленно выкинуть 293-ю и бежать в магазин за полевиками
Copyright © Balancer 1997..2018
Создано 15.03.2011
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 15.03.2011
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

.svg/220px-Encoder_Disc_(3-Bit).svg.png.htm){kind=link}