-
/Buggy-Motor14_1.JPG)
Реальна ли конструкция?
Теги:
 Bredonosec
Bredonosec
john5r> у крыла с таким удлинением индуктивное сопротивление велико, разве нет? или там что-нибудь ххитрое типа воздуховодов к законцовкам предусмотрено?
Да законцовки, загнутые вниз, - уже попытка чего-то противопоставить.. Вот только криво слабано.. Чего-нить навроде крылышек уиткомба или хотя б сдвинутых за заднюю кромку законцовок вниз было б понятнее для сей цели (ослаблять концевые вихри - то самое, что индуктивное сопротивление создает)
А по прожЭкту вопросов много - и нафига ротор отклонен назад в канале, наклоненном вперед (по идее б наоборот - вперед наклонить надобно), и что за срамная бульба вокруг канала прилабана.. и на какой паркет собираются сажать шасси из колес от магазинной тележки, и т.д.
Да законцовки, загнутые вниз, - уже попытка чего-то противопоставить.. Вот только криво слабано.. Чего-нить навроде крылышек уиткомба или хотя б сдвинутых за заднюю кромку законцовок вниз было б понятнее для сей цели (ослаблять концевые вихри - то самое, что индуктивное сопротивление создает)
А по прожЭкту вопросов много - и нафига ротор отклонен назад в канале, наклоненном вперед (по идее б наоборот - вперед наклонить надобно), и что за срамная бульба вокруг канала прилабана.. и на какой паркет собираются сажать шасси из колес от магазинной тележки, и т.д.
 инфо
инфо инструменты
инструменты rnst
rnst

кстати - реален ли и вот этот проект?
Очевидна нереальность создания "легкоуправляемого" низковысотного ЛА построенного по классической схеме.
Но предполагаемая схема полевого штурмовика "ромбовидная этажерка" (продольный интегральный триплан)+ среднеразмерный выдвижной винт авторотации (30% автожир)
Имеет значительное сходство со схемой V-STAR http://www.membrana.ru/articles/techn...83300.html
- что позволяет надеяться на жизнеспособность данной аэродинамической схемы "крыло замкнутого контура" ( вдвое легче классического крыла, при равной подьемной силе)- как основы для отработки многофункционального носителя штурмовых вооружений безаэродромного базирования. Тем более, что некоторые образцы отечественных ЛЛА вплотную приближаются по своим ТТХ к искомому аппарату: (как "составные компоненты" комплекса «Штурмовик STOL»)
Иркут-850.. Aвиационный комплекс на базе пилотируемых мотопланеров Stemme S-10VT, --(Макс. взлетная масса, кг- 860, Масса полезной нагрузки, кг- 200, практический потолок в пилотируемом варианте- 6000, продолжительность полета- 12часов, Макс. скорость, км/ч- 270).
Лёгкий автожир А-002М - Корпорации "Иркут". (Экипаж, чел - 1, Пассажиры, чел - 2, Максимальная взлетная масса, кг- 1030, Полезная нагрузка,кг- 150 , Запас топлива АИ-98, л-150, Скорость горизонтального полета, км/ч- 200, Дальность полета в пилотируемом варианте, км- 430 ,Длина разбега, м- 0.. 30, Мощность двигателя, л.с. 210 посадка на неподготовленные площадки; управление автожиров не требует высокой квалификации )
Основная сложность заключается в разработке системы атоматической стабилизации полета на "критических" режимах (взлет-посадка). (безаэродромное базирование + снижение затрат на квалификацию летного состава) Данная проблема ранее решалась путем обеспечения "утроенной" мощности двигательной установки, что позволяет вертикальный взлет ( аппараты типа "Харриер", вертолеты). Однако существуют другие способы, например - оснащение ЛА ротором "прыжкового" взлета (посадка по типу автожира), где раскрутка ротора осуществляется стартовыми пиропатронами (далее- миниПВРД) закрепленными на законцовках лопастей. По достижении "самолетных" параметров полета (скорости, на которой начинает работать подъемная сила обычного крыла) стартовый ротор убирается (или фиксируется в положении минимального аэродинамического сопротивления). Принцип действия управляющей системы "автоматической стабилизации посадки" заключается в согласовании алгоритма "активации" роторной установки по сигналу датчиков ориентации (высота-скорость), таким образом, чтобы пилоту было достаточно подвести ЛА к точке посадки и включить посадочную систему.
Конструктивная схема безаэродромного штурмовика определяется условиями применения с учетом "повышенного содержания металла в воздухе". Снизу-спереди и снизу-сбоку экипаж и силовая должны быть прикрыты от массированного автоматного огня
То есть нижняя "крыло-площадка ВП" - есть. Верхнее несущее крыло - тоже.
Боковые пилоны - под углом, чтобы образовывать прикрытие членам экипажа, размещенных уступом друг за другом (стрелок, пилот). За ними - винтомоторная, естественно с толкающим многолопастным винтом малого диаметра ( в кольце, нижний сектор которого - пресловутая "крыло-площадка" с вентилятором вздушной подушки и ограждением).
Какой-то экранный эффект на посадке, она создаст. И дополнительную подъемную силу при взлете - тоже. При аварийной посадке не допустит винту зацепить грунт.
Получается полутораплан с выдвинутым вперед нижним крылом.
Пилоны и площадка - "сэндвич" кевлар-пена-кевлар на каркасе.
Возможно козырек бронестекла перед стрелком в узком незащищенном лобовом секторе. Остальные конструктивные элементы балансировки и управления подстраиваем по эту, единственно возможную (для наших целей) - схему. ВЛАСТИ.НЕТ - Новости Украины. Политика, экономика, выборы, Янукович и остальные ...
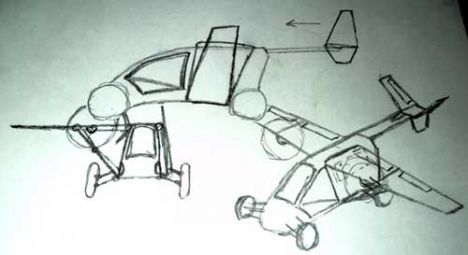
В основе - жесткая пространственная конструкция. Верхнее несущее крыло обратной стреловидности, установленное (на скошенных вперед- пилонах), на нижнее крыло, растянутое в продольном направлении. На верхней схеме - обе законцовки основного крыла (от места "излома" - до оконечности) установлены в положение максимального размаха. На нижней - они в положении, образующем крыло замкнутого контура с нижней "площадкой". Законцовки - пластиковые, съемные. Двух типоразмеров, большей и меньшей площадью. Большая площадь - под двух пилотов, и более мощный двигатель (или- пилот и тяжелый комплект вооружения, или БРЛС "Оса"). Меньшая площадь - соответственно, легкий мотор и легкое оружие с одним пилотом или беспилотный. На нижнем рисунке- винт авторотации выдвинут в рабочее положение. . Ось проходит через центр масс аппарата в точке крепления мотоблока к средней части несущего крыла. Данные устройства авторотации - съемные. На верхнем их и нету. Основные рулевые поверхности находятся непосредственно в зоне обдува маршевого винта- повышение маневренности на малых скоростях полета у земли. Важное- для аппарата безаэродромного базирования. Получится ли посадка на воду в стандарте, или придется что-то накручивать дополнительно- выяснится только при испытаниях. А так - все элементы конструкции- давно применялись сами по себе, по отдельности. Неразрешимых проблем возникнуть не должно.
НЕ исключаются другие конструктивные схемы, основанные например на
1) использовании балансирного крыла : КАИ-81 (Казанский государственный технический университет E-mail:root@kaiadm.kazan.ru):
Отличительной особенностью конструкции самолета, является принципиально новая схема жестких несущих плоскостей типа "дельтаплан", самолетная система управления и полностью закрытая кабина экипажа. Такая конструкция летательного аппарата в 2..2,5 раза повышает скорость полета по сравнению с дельталетом, улучшает пилотажные свойства и повышает безопасность полета.
Самолет "КАИ-81" имеет жесткое пластиковое крыло. Используется балансирный принцип обеспечения продольной устойчивости как у дельталетов. Путевое и поперечное управление осуществляется с помощью элеронов как на самолете. Кабина полностью закрыта фонарем. Съемное крыло делает КАИ-81 компактным при транспортировке и стоянке. Планирование при выключенном двигателе является штатным режимом. При брошенном управлении совершает устойчивый горизонтальный полет или полет со снижением при выключенном двигателе. ЛА способен самостоятельно парировать внешние возмущения или грубые ошибки пилота.
Технические характеристики
Скорость максимальная, км\ч . . . . . . . . . . . . . . . . . . .225
Скорость крейсерская, км\ч . . . . . . . . . . . . . . . . . . . . .200
Дальность полета, макс, км) . . . . . . . . . . . . . . . . . . . . .990
Скорость набора высоты , м\с . . . . . . . . . . . . . . . . . . .4,5
Посадочная скорость, км\ч . . . . . . . . . . . . . . . . . . . . . .54
Скорость отрыва, км\ч . . . . . . . . . . . . . . . . . . . . . . . . . .80
Масса самолета взлетная, кг . . . . . . . . . . . . . . . . . . . . 464
Масса топлива, кг . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
Масса полезной нагрузки, кг . . . . . . . . . . . . . . . . . . . . . 175
Размах крыла, м . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8,82
Длина фюзеляжа, м . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3,1
Длина взлетно-посадочной полосы, . . . . . . . . . . . . . . м 70
Двигатель . . . . . . . . . . . . . . . . . . . . . . . . . .ROTAX 582 UL-2V
Изобретение Патент РФ 2244662 от 11.04.2002
2)Или вибропредкрылков как у "Lark-4" (заявленные ТТХ :Вес - 385 кг; размах крыльев - 5,8 м; грузоподъемность - 600 кг; вместимость - 4 человека; максимальная высотa полета - 12 000 м; дальность полета: 4 чел. - 1500 км 2 чел. - 3400 км Двигатель ТВД-400 весом 90 кг, мощностью - 560 л. с.) + применение в разработке ЛА крыла с новым видом активной механизации и оригинального взлётно-посадочного устройства (ВПУ) было положено разработчиками в основу конструкции нового самолёта.
Использование этого крыла и ВПУ позволило уменьшить размах крыльев нового самолёта почти в два раза в сравнении с их размахом у традиционного самолёта.
Столь значительное уменьшение размаха крыльев повлекло за собой уменьшение профильного сопротивления и облегчило вес конструкции самолёта. Кроме того, ряд других технических решений позволил намного снизить и индуктивные потери. В совокупности это дало возможность заметно уменьшить общие аэродинамические потери, и в итоге - резко снизить расход горючего и заметно увеличить скорость полёта ЛА.
Во вторых, особые свойства нового крыла позволили сохранить его аэродинамическую эффективность до невиданно низких ранее скоростей, а именно, до 43 км в час.- конец цитаты
Хотя последний ЛА лично мне кажется малореальным- слишком большая зависимость от "новых принципов создания подъемной силы".. не получится достичь 100%го расчетного эффекта - и весь проект умер..
Другое дело "комбинирование" давно отработанных схем и режимов полета.. Именно поэтому наиболее перспективной считаю "конструктивную адаптацию" схемы V-STAR http://www.membrana.ru/articles/techn...83300.html чтобы создать однодвигательный ЛА, у которого часть подъемной силы (уменьшающейся в процессе снижения скорости полета на посадке) компенсируется увеличением "авторотационной" подъемной силы. Превращая "вредную" энергию скорости полета ЛА, в полезную энергию создания вспомогательной воздушной подушки (передавая высокие обороты ротора авторотации, раскрученного набегающим потоком) на вентилятор ВП, через соответствующий редуктор
Собственно говоря, сам малоразмерный боевой ЛА полностью внеаэродромного базирования - уже летает ( в беспилотном варианте). Причем достигнуты гораздо большие ТТХ - именно по "составляющей вертикальной тяги ". Цитата НВО 11.2006:
«Первый полет Battle Hog (предназначенного для непосредственной поддержки войск в городской среде и районах интенсивной застройки, в лесах, а также в других районах с черезвычайно сложным рельефом местности) состоялся 19 января 2005г, а его усовершенствованный вариант демонстрировался специалистам в июле 2006.. осуществлялось руление, проверка двигателя, а также висение.. ББЛА сможет находиться в полете до 8 часов, и развивать скорость до 330км/час. Во время испытаний в лесистой местности аппарат продемонстрировал способность совершать полет ниже верхушек деревьев, что позволит обеспечить его крайне низкую заметность. Дистанционное управление его полетом с огибанием рельефа местности и в режиме обхода препятствий обеспечивается с помощью РЛС фирмы "Рейтеон".Управление полетом осуществляется за счет изменения скорости вращения и угла наклона подъемного вентилятора с использованием запатентованной компанией "Америкэн дайнемикс" технологии Higt Torgue Aerial Lift. Бронирование кевларом защищает подъемный вентилятор от пуль калибра 7,62мм на дистанции до 50м, а также от воздействия разрывов гранат ручных противотанковых гранатометов в непосредственной близости от аппарата. Вооружение: управляемые ракеты AGM-114K. класса "воздух-земля", или НАР "Гидра-70", пулемет М134 "Миниган" калибра 6.62мм. Взлетная масса около 1450кг, размах крыла 5,2м и длина 3,8м оснащен газотурбинным двигателем T63-A720 (первоначальный вариант - ДВС). Считается что ББЛА подобного класса благодаря вертикальному взлету и посадке смогут осуществлять непосредственную поддержку войск с минимальной задержкой и погрешностью нацеливания, что существенно изменит характер городских боев.»
В принципе - оборудуем кабиной пилота, минус аппаратура дистанционного управления и получаем искомый внеаэродромный штурмовик на базе готовой разработки..
Что не устраивает в данном случае:
1) "чисто" вертикальный взлет, режимы "висения" означают мощный (дорогой) двигатель и большой расход горючего = (малая боевая нагрузка, уменьшение радиуса действия)
2) высокая стоимость и сравнительно малая "доступность" ГТД иностранного производства - относительно автомобильного ДВС мощностью 450лс (двигатель Саадер А-22)
А в общем и целом – сам аппарат разрабатываем по программе «аэротакси», собираем из готовых узлов (авто-мототехники) и продаем как туристический аксессуар…
Очевидна нереальность создания "легкоуправляемого" низковысотного ЛА построенного по классической схеме.
Но предполагаемая схема полевого штурмовика "ромбовидная этажерка" (продольный интегральный триплан)+ среднеразмерный выдвижной винт авторотации (30% автожир)
Имеет значительное сходство со схемой V-STAR http://www.membrana.ru/articles/techn...83300.html
- что позволяет надеяться на жизнеспособность данной аэродинамической схемы "крыло замкнутого контура" ( вдвое легче классического крыла, при равной подьемной силе)- как основы для отработки многофункционального носителя штурмовых вооружений безаэродромного базирования. Тем более, что некоторые образцы отечественных ЛЛА вплотную приближаются по своим ТТХ к искомому аппарату: (как "составные компоненты" комплекса «Штурмовик STOL»)
Иркут-850.. Aвиационный комплекс на базе пилотируемых мотопланеров Stemme S-10VT, --(Макс. взлетная масса, кг- 860, Масса полезной нагрузки, кг- 200, практический потолок в пилотируемом варианте- 6000, продолжительность полета- 12часов, Макс. скорость, км/ч- 270).
Лёгкий автожир А-002М - Корпорации "Иркут". (Экипаж, чел - 1, Пассажиры, чел - 2, Максимальная взлетная масса, кг- 1030, Полезная нагрузка,кг- 150 , Запас топлива АИ-98, л-150, Скорость горизонтального полета, км/ч- 200, Дальность полета в пилотируемом варианте, км- 430 ,Длина разбега, м- 0.. 30, Мощность двигателя, л.с. 210 посадка на неподготовленные площадки; управление автожиров не требует высокой квалификации )
Основная сложность заключается в разработке системы атоматической стабилизации полета на "критических" режимах (взлет-посадка). (безаэродромное базирование + снижение затрат на квалификацию летного состава) Данная проблема ранее решалась путем обеспечения "утроенной" мощности двигательной установки, что позволяет вертикальный взлет ( аппараты типа "Харриер", вертолеты). Однако существуют другие способы, например - оснащение ЛА ротором "прыжкового" взлета (посадка по типу автожира), где раскрутка ротора осуществляется стартовыми пиропатронами (далее- миниПВРД) закрепленными на законцовках лопастей. По достижении "самолетных" параметров полета (скорости, на которой начинает работать подъемная сила обычного крыла) стартовый ротор убирается (или фиксируется в положении минимального аэродинамического сопротивления). Принцип действия управляющей системы "автоматической стабилизации посадки" заключается в согласовании алгоритма "активации" роторной установки по сигналу датчиков ориентации (высота-скорость), таким образом, чтобы пилоту было достаточно подвести ЛА к точке посадки и включить посадочную систему.
Конструктивная схема безаэродромного штурмовика определяется условиями применения с учетом "повышенного содержания металла в воздухе". Снизу-спереди и снизу-сбоку экипаж и силовая должны быть прикрыты от массированного автоматного огня
То есть нижняя "крыло-площадка ВП" - есть. Верхнее несущее крыло - тоже.
Боковые пилоны - под углом, чтобы образовывать прикрытие членам экипажа, размещенных уступом друг за другом (стрелок, пилот). За ними - винтомоторная, естественно с толкающим многолопастным винтом малого диаметра ( в кольце, нижний сектор которого - пресловутая "крыло-площадка" с вентилятором вздушной подушки и ограждением).
Какой-то экранный эффект на посадке, она создаст. И дополнительную подъемную силу при взлете - тоже. При аварийной посадке не допустит винту зацепить грунт.
Получается полутораплан с выдвинутым вперед нижним крылом.
Пилоны и площадка - "сэндвич" кевлар-пена-кевлар на каркасе.
Возможно козырек бронестекла перед стрелком в узком незащищенном лобовом секторе. Остальные конструктивные элементы балансировки и управления подстраиваем по эту, единственно возможную (для наших целей) - схему. ВЛАСТИ.НЕТ - Новости Украины. Политика, экономика, выборы, Янукович и остальные ...
В основе - жесткая пространственная конструкция. Верхнее несущее крыло обратной стреловидности, установленное (на скошенных вперед- пилонах), на нижнее крыло, растянутое в продольном направлении. На верхней схеме - обе законцовки основного крыла (от места "излома" - до оконечности) установлены в положение максимального размаха. На нижней - они в положении, образующем крыло замкнутого контура с нижней "площадкой". Законцовки - пластиковые, съемные. Двух типоразмеров, большей и меньшей площадью. Большая площадь - под двух пилотов, и более мощный двигатель (или- пилот и тяжелый комплект вооружения, или БРЛС "Оса"). Меньшая площадь - соответственно, легкий мотор и легкое оружие с одним пилотом или беспилотный. На нижнем рисунке- винт авторотации выдвинут в рабочее положение. . Ось проходит через центр масс аппарата в точке крепления мотоблока к средней части несущего крыла. Данные устройства авторотации - съемные. На верхнем их и нету. Основные рулевые поверхности находятся непосредственно в зоне обдува маршевого винта- повышение маневренности на малых скоростях полета у земли. Важное- для аппарата безаэродромного базирования. Получится ли посадка на воду в стандарте, или придется что-то накручивать дополнительно- выяснится только при испытаниях. А так - все элементы конструкции- давно применялись сами по себе, по отдельности. Неразрешимых проблем возникнуть не должно.
НЕ исключаются другие конструктивные схемы, основанные например на
1) использовании балансирного крыла : КАИ-81 (Казанский государственный технический университет E-mail:root@kaiadm.kazan.ru):
Отличительной особенностью конструкции самолета, является принципиально новая схема жестких несущих плоскостей типа "дельтаплан", самолетная система управления и полностью закрытая кабина экипажа. Такая конструкция летательного аппарата в 2..2,5 раза повышает скорость полета по сравнению с дельталетом, улучшает пилотажные свойства и повышает безопасность полета.
Самолет "КАИ-81" имеет жесткое пластиковое крыло. Используется балансирный принцип обеспечения продольной устойчивости как у дельталетов. Путевое и поперечное управление осуществляется с помощью элеронов как на самолете. Кабина полностью закрыта фонарем. Съемное крыло делает КАИ-81 компактным при транспортировке и стоянке. Планирование при выключенном двигателе является штатным режимом. При брошенном управлении совершает устойчивый горизонтальный полет или полет со снижением при выключенном двигателе. ЛА способен самостоятельно парировать внешние возмущения или грубые ошибки пилота.
Технические характеристики
Скорость максимальная, км\ч . . . . . . . . . . . . . . . . . . .225
Скорость крейсерская, км\ч . . . . . . . . . . . . . . . . . . . . .200
Дальность полета, макс, км) . . . . . . . . . . . . . . . . . . . . .990
Скорость набора высоты , м\с . . . . . . . . . . . . . . . . . . .4,5
Посадочная скорость, км\ч . . . . . . . . . . . . . . . . . . . . . .54
Скорость отрыва, км\ч . . . . . . . . . . . . . . . . . . . . . . . . . .80
Масса самолета взлетная, кг . . . . . . . . . . . . . . . . . . . . 464
Масса топлива, кг . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .65
Масса полезной нагрузки, кг . . . . . . . . . . . . . . . . . . . . . 175
Размах крыла, м . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8,82
Длина фюзеляжа, м . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3,1
Длина взлетно-посадочной полосы, . . . . . . . . . . . . . . м 70
Двигатель . . . . . . . . . . . . . . . . . . . . . . . . . .ROTAX 582 UL-2V
Изобретение Патент РФ 2244662 от 11.04.2002
2)Или вибропредкрылков как у "Lark-4" (заявленные ТТХ :Вес - 385 кг; размах крыльев - 5,8 м; грузоподъемность - 600 кг; вместимость - 4 человека; максимальная высотa полета - 12 000 м; дальность полета: 4 чел. - 1500 км 2 чел. - 3400 км Двигатель ТВД-400 весом 90 кг, мощностью - 560 л. с.) + применение в разработке ЛА крыла с новым видом активной механизации и оригинального взлётно-посадочного устройства (ВПУ) было положено разработчиками в основу конструкции нового самолёта.
Использование этого крыла и ВПУ позволило уменьшить размах крыльев нового самолёта почти в два раза в сравнении с их размахом у традиционного самолёта.
Столь значительное уменьшение размаха крыльев повлекло за собой уменьшение профильного сопротивления и облегчило вес конструкции самолёта. Кроме того, ряд других технических решений позволил намного снизить и индуктивные потери. В совокупности это дало возможность заметно уменьшить общие аэродинамические потери, и в итоге - резко снизить расход горючего и заметно увеличить скорость полёта ЛА.
Во вторых, особые свойства нового крыла позволили сохранить его аэродинамическую эффективность до невиданно низких ранее скоростей, а именно, до 43 км в час.- конец цитаты
Хотя последний ЛА лично мне кажется малореальным- слишком большая зависимость от "новых принципов создания подъемной силы".. не получится достичь 100%го расчетного эффекта - и весь проект умер..
Другое дело "комбинирование" давно отработанных схем и режимов полета.. Именно поэтому наиболее перспективной считаю "конструктивную адаптацию" схемы V-STAR http://www.membrana.ru/articles/techn...83300.html чтобы создать однодвигательный ЛА, у которого часть подъемной силы (уменьшающейся в процессе снижения скорости полета на посадке) компенсируется увеличением "авторотационной" подъемной силы. Превращая "вредную" энергию скорости полета ЛА, в полезную энергию создания вспомогательной воздушной подушки (передавая высокие обороты ротора авторотации, раскрученного набегающим потоком) на вентилятор ВП, через соответствующий редуктор
Собственно говоря, сам малоразмерный боевой ЛА полностью внеаэродромного базирования - уже летает ( в беспилотном варианте). Причем достигнуты гораздо большие ТТХ - именно по "составляющей вертикальной тяги ". Цитата НВО 11.2006:
«Первый полет Battle Hog (предназначенного для непосредственной поддержки войск в городской среде и районах интенсивной застройки, в лесах, а также в других районах с черезвычайно сложным рельефом местности) состоялся 19 января 2005г, а его усовершенствованный вариант демонстрировался специалистам в июле 2006.. осуществлялось руление, проверка двигателя, а также висение.. ББЛА сможет находиться в полете до 8 часов, и развивать скорость до 330км/час. Во время испытаний в лесистой местности аппарат продемонстрировал способность совершать полет ниже верхушек деревьев, что позволит обеспечить его крайне низкую заметность. Дистанционное управление его полетом с огибанием рельефа местности и в режиме обхода препятствий обеспечивается с помощью РЛС фирмы "Рейтеон".Управление полетом осуществляется за счет изменения скорости вращения и угла наклона подъемного вентилятора с использованием запатентованной компанией "Америкэн дайнемикс" технологии Higt Torgue Aerial Lift. Бронирование кевларом защищает подъемный вентилятор от пуль калибра 7,62мм на дистанции до 50м, а также от воздействия разрывов гранат ручных противотанковых гранатометов в непосредственной близости от аппарата. Вооружение: управляемые ракеты AGM-114K. класса "воздух-земля", или НАР "Гидра-70", пулемет М134 "Миниган" калибра 6.62мм. Взлетная масса около 1450кг, размах крыла 5,2м и длина 3,8м оснащен газотурбинным двигателем T63-A720 (первоначальный вариант - ДВС). Считается что ББЛА подобного класса благодаря вертикальному взлету и посадке смогут осуществлять непосредственную поддержку войск с минимальной задержкой и погрешностью нацеливания, что существенно изменит характер городских боев.»
В принципе - оборудуем кабиной пилота, минус аппаратура дистанционного управления и получаем искомый внеаэродромный штурмовик на базе готовой разработки..
Что не устраивает в данном случае:
1) "чисто" вертикальный взлет, режимы "висения" означают мощный (дорогой) двигатель и большой расход горючего = (малая боевая нагрузка, уменьшение радиуса действия)
2) высокая стоимость и сравнительно малая "доступность" ГТД иностранного производства - относительно автомобильного ДВС мощностью 450лс (двигатель Саадер А-22)
А в общем и целом – сам аппарат разрабатываем по программе «аэротакси», собираем из готовых узлов (авто-мототехники) и продаем как туристический аксессуар…


- Fakir [22.07.2011 15:45]: Перенос в новую тему Колеоптер - SNECMA C450 Coléoptère
- Fakir [22.07.2011 16:13]: Перенос сообщений в Колеоптер - SNECMA C450 Coléoptère
- Fakir [22.07.2011 16:20]: Перенос сообщений в Колеоптер - SNECMA C450 Coléoptère

Ну, как более-менее подходящая тема... обдумывал мысль - как должен выглядеть самолет, чтобы он мог при этом работать еще и автомобилем ")
Что-то типа вот такой штуки. Взлетная масса - около 300-400 кг, т.е. это СЛА. Корпус - композиты и алюминиевая рама. Двигатель - 4-цилиндровый оппозитник под задним сиденьем, что-то типа 50 лошадей. Охлаждение - воздушное, по бокам от сидения - воздухозаборники, образующие прямоток через оребрение цилиндров. В наземном варианте можно еще обдувать принцдительным вентилятором. Топливный бак - под передним сиденьем. Посадка пилота/водителя и пассажира - продольная, пассажир сзади. Багажный отсек - за спинкой кресла пассажира. Двухместный (хотя можно 'отмасштабировать' и до 3 рядов/2 человек в ряду, т.е. чего-то размером с Damas).
В автомобильном варианте, крыло дважды сложено так, чтобы концы консолей торчали вверх, на высоту около 2 м (размах крыла - около 7-8 метров, высота корпуса - около 1.7 метра, клиренс - 20 см). Стабилизатор/РН/РВ выдвигаются на двух балках назад и раскладываются, в транспортном положении средняя часть ложится вплотную к центральной секции крыла на крышу кабины, а консоли - параллельно сложенному крылу вдоль корпуса.
Управление идет через электропривод и ЭДСУ, колесами и рулями согласовано. Собственно, взлет можно вообще автоматизировать - поставил на дорожку, нажал кнопку, оно взлетело и на 100 метрах высоты частично отдало управление обратно. Частично - так, чтобы пилот мог выбрать направление/снижение/подъем, но не убился и не залез в запрещенную зону.
Два тяговых винта, с противовращением, привод обоих от одного двигателя через карданный вал в носке крыла. Привод при автомобильном движении - на задние колеса. Установлен мотор-генератор и двигатель/стартер, мощностью примерно 1/4 от мощности ДВС - для запуска, для взлетного режима работы, и для движения в режиме гибрида, а также для режима аварийной посадки. Ротор двигателя/стартера заменяет маховик ДВС.

Что-то типа вот такой штуки. Взлетная масса - около 300-400 кг, т.е. это СЛА. Корпус - композиты и алюминиевая рама. Двигатель - 4-цилиндровый оппозитник под задним сиденьем, что-то типа 50 лошадей. Охлаждение - воздушное, по бокам от сидения - воздухозаборники, образующие прямоток через оребрение цилиндров. В наземном варианте можно еще обдувать принцдительным вентилятором. Топливный бак - под передним сиденьем. Посадка пилота/водителя и пассажира - продольная, пассажир сзади. Багажный отсек - за спинкой кресла пассажира. Двухместный (хотя можно 'отмасштабировать' и до 3 рядов/2 человек в ряду, т.е. чего-то размером с Damas).
В автомобильном варианте, крыло дважды сложено так, чтобы концы консолей торчали вверх, на высоту около 2 м (размах крыла - около 7-8 метров, высота корпуса - около 1.7 метра, клиренс - 20 см). Стабилизатор/РН/РВ выдвигаются на двух балках назад и раскладываются, в транспортном положении средняя часть ложится вплотную к центральной секции крыла на крышу кабины, а консоли - параллельно сложенному крылу вдоль корпуса.
Управление идет через электропривод и ЭДСУ, колесами и рулями согласовано. Собственно, взлет можно вообще автоматизировать - поставил на дорожку, нажал кнопку, оно взлетело и на 100 метрах высоты частично отдало управление обратно. Частично - так, чтобы пилот мог выбрать направление/снижение/подъем, но не убился и не залез в запрещенную зону.
Два тяговых винта, с противовращением, привод обоих от одного двигателя через карданный вал в носке крыла. Привод при автомобильном движении - на задние колеса. Установлен мотор-генератор и двигатель/стартер, мощностью примерно 1/4 от мощности ДВС - для запуска, для взлетного режима работы, и для движения в режиме гибрида, а также для режима аварийной посадки. Ротор двигателя/стартера заменяет маховик ДВС.
Убей в себе зомби!

hcube> Ну, как более-менее подходящая тема... обдумывал мысль - как должен выглядеть самолет, чтобы он мог при этом работать еще и автомобилем
Нашел движок. Оказывается, 4-цилиндровые B4 вовсю выпускал... VW, для Beetle и T1-T3. Самый мощный движок из серии - 2 литра, 85 лошадей. Вроде даже есть инжекторная версия. T3 Б/У стоит начиная от 25 тысяч") .
.
Также нашел, откуда можно и нужно позаимствовать элементы подвески - с багги. Стоит - от 90 тысяч, думаю, элементы подвески и трансмиссии - еще дешевле.

Надо только продумать развесовку и вынос задних колес, чтобы примерно сбалансировать нагрузку на задние и передние колеса при посадке. Ну, и до кучи ЭДСУ сделать, чтобы при касании не занесло.
На двигатель вместо штатного маховика надо установить мотор-генератор, мощностью до 15 КВт - как подспорье на взлетном режиме, рекуператор при движении по шоссе, и аварийный двигатель для посадки. Ну, и соответствующую литиевую батарею, разумеется.
Нашел движок. Оказывается, 4-цилиндровые B4 вовсю выпускал... VW, для Beetle и T1-T3. Самый мощный движок из серии - 2 литра, 85 лошадей. Вроде даже есть инжекторная версия. T3 Б/У стоит начиная от 25 тысяч
. Также нашел, откуда можно и нужно позаимствовать элементы подвески - с багги. Стоит - от 90 тысяч, думаю, элементы подвески и трансмиссии - еще дешевле.

Надо только продумать развесовку и вынос задних колес, чтобы примерно сбалансировать нагрузку на задние и передние колеса при посадке. Ну, и до кучи ЭДСУ сделать, чтобы при касании не занесло.
На двигатель вместо штатного маховика надо установить мотор-генератор, мощностью до 15 КВт - как подспорье на взлетном режиме, рекуператор при движении по шоссе, и аварийный двигатель для посадки. Ну, и соответствующую литиевую батарею, разумеется.
Убей в себе зомби!


hcube>T3 Б/У стоит начиная от 25 тысяч
Автомобильный мотор на самолёт ставить никто не позволит. Есть конечно конверсионные, но это уже совсем другие деньги. Даже за б/у.
Автомобильный мотор на самолёт ставить никто не позволит. Есть конечно конверсионные, но это уже совсем другие деньги. Даже за б/у.

hcube>>T3 Б/У стоит начиная от 25 тысяч
ED> Автомобильный мотор на самолёт ставить никто не позволит. Есть конечно конверсионные, но это уже совсем другие деньги. Даже за б/у.
На нормальный - да. А на СЛА-самоделку... или KIT - 'прикрути мотор, какой найдешь'
Впрочем, ровно тот же оппозитник народ и конверсионный выпускает - например Ротакс 912, кажется. Хотя, конечно, оно и дороже.
Есть вот такой вопрос - нужен привод на колеса - чтобы можно было по дороге общего пользования ездить. Очевидно, задний - потому что это удобнее всего. Плюс еще - см.выше - к ДВС прикручен еще 'стартерный' электродвигатель в последовательности ДВС - сцепление - электродвигатель - КПП. Наверное, есть смысл между КПП и электродвигателем поставить еще одну муфту и оттуда снять момент на привод воздушных винтов - тоже через муфту, чтобы в 'автомобильном' режиме на винты привода не было. Какие будут мысли по этому поводу? Как, к примеру, устроен съем момента во всяких поливальных машинах?
ED> Автомобильный мотор на самолёт ставить никто не позволит. Есть конечно конверсионные, но это уже совсем другие деньги. Даже за б/у.
На нормальный - да. А на СЛА-самоделку... или KIT - 'прикрути мотор, какой найдешь'
Впрочем, ровно тот же оппозитник народ и конверсионный выпускает - например Ротакс 912, кажется. Хотя, конечно, оно и дороже.
Есть вот такой вопрос - нужен привод на колеса - чтобы можно было по дороге общего пользования ездить. Очевидно, задний - потому что это удобнее всего. Плюс еще - см.выше - к ДВС прикручен еще 'стартерный' электродвигатель в последовательности ДВС - сцепление - электродвигатель - КПП. Наверное, есть смысл между КПП и электродвигателем поставить еще одну муфту и оттуда снять момент на привод воздушных винтов - тоже через муфту, чтобы в 'автомобильном' режиме на винты привода не было. Какие будут мысли по этому поводу? Как, к примеру, устроен съем момента во всяких поливальных машинах?
Убей в себе зомби!
hcube> Ну, как более-менее подходящая тема... обдумывал мысль - как должен выглядеть самолет, чтобы он мог при этом работать еще и автомобилем
hcube> http://pics.livejournal.com/hcube/pic/0007gc7r
уже есть такие.
Только не 2 тянущих на крыле (это сложно и крылья тяжелы получаются, да и систему питания при сьемных надо усложнять), а один толкающий в кольце в попе. Крылья, само собой, сьёмные. Балка хвостовая выходит снизу, под пропеллером.
Название не помню.
hcube> http://pics.livejournal.com/hcube/pic/0007gc7r
уже есть такие.
Только не 2 тянущих на крыле (это сложно и крылья тяжелы получаются, да и систему питания при сьемных надо усложнять), а один толкающий в кольце в попе. Крылья, само собой, сьёмные. Балка хвостовая выходит снизу, под пропеллером.
Название не помню.
hcube> Какие будут мысли по этому поводу? Как, к примеру, устроен съем момента во всяких поливальных машинах?
а не проще ли сделать единый агрегат, вращающий генератор, а электромоторы в колёсах и на винт?
Или это тяжелее?
а не проще ли сделать единый агрегат, вращающий генератор, а электромоторы в колёсах и на винт?
Или это тяжелее?
Bredonosec> а не проще ли сделать единый агрегат, вращающий генератор, а электромоторы в колёсах и на винт? Или это тяжелее?
Сильно тяжелее. В крылья идет просто вал или ременная трансмиссия - это проще, чем ставить генератор на 50 КВт, и два двигателя по 25. И легче - заметно. На 25 КВт нужны провода с палец толщиной :-DD. А тут - просто короб с широким ремнем внутри.
'Микроавтобусный' вариант позволил бы сделать толкающий винт в заднице, между балками, да. Но тут корпус уже метра, поэтому нормальный винт туда не влезет. Разве что по винту вокруг каждой балки сделать А уширять корпус - значит портить аэродинамику. Нижнее размещение хвостовой балки тоже не вариант - большой шанс при взлете на малой скорости землю цепануть.
Поэтому - винты на крыльях, а туда - ремень. Который в свою очередь проброшен с вала, идущего вдоль (под) двигателя. Зубчатые ремни сейчас есть очень разные.
Крылья, кстати, не съемные, а складные - приведение в готовность - менее 5 минут. Если сильно надо, можно вообще электроприводом развернуть и зафиксировать. И оно так со сложенным крылом и едет - как автомобиль. Приехал на ВПП, крыло развернул, хвост развернул, хвостовую балку выдвинул - и полетел. Может быть даже не выходя из кабины
Как бонус, при более высокой мощности двигателя, конструкция в принципе позволяет сделать конвертоплан типа Оспри - дополнительный узел поворота в крыльях, позволяющий винтами тянуть вверх, плюс винты увеличенного диаметра, плюс измененная силовая схема крыла.
Сильно тяжелее. В крылья идет просто вал или ременная трансмиссия - это проще, чем ставить генератор на 50 КВт, и два двигателя по 25. И легче - заметно. На 25 КВт нужны провода с палец толщиной :-DD. А тут - просто короб с широким ремнем внутри.
'Микроавтобусный' вариант позволил бы сделать толкающий винт в заднице, между балками, да. Но тут корпус уже метра, поэтому нормальный винт туда не влезет. Разве что по винту вокруг каждой балки сделать
А уширять корпус - значит портить аэродинамику. Нижнее размещение хвостовой балки тоже не вариант - большой шанс при взлете на малой скорости землю цепануть.Поэтому - винты на крыльях, а туда - ремень. Который в свою очередь проброшен с вала, идущего вдоль (под) двигателя. Зубчатые ремни сейчас есть очень разные.
Крылья, кстати, не съемные, а складные - приведение в готовность - менее 5 минут. Если сильно надо, можно вообще электроприводом развернуть и зафиксировать. И оно так со сложенным крылом и едет - как автомобиль. Приехал на ВПП, крыло развернул, хвост развернул, хвостовую балку выдвинул - и полетел. Может быть даже не выходя из кабины
Как бонус, при более высокой мощности двигателя, конструкция в принципе позволяет сделать конвертоплан типа Оспри - дополнительный узел поворота в крыльях, позволяющий винтами тянуть вверх, плюс винты увеличенного диаметра, плюс измененная силовая схема крыла.
Убей в себе зомби!
hcube>на СЛА-самоделку... или KIT - 'прикрути мотор, какой найдешь
"Какой найдешь" только для партизанских полётов. Ну ещё для СЛА, которым только вокруг аэродрома можно. Да и то с оговорками. Для всего остального (и для китов тоже) требуется сертификация. Абы какой мотор её не пройдёт.
"Какой найдешь" только для партизанских полётов. Ну ещё для СЛА, которым только вокруг аэродрома можно. Да и то с оговорками. Для всего остального (и для китов тоже) требуется сертификация. Абы какой мотор её не пройдёт.
hcube> Сильно тяжелее.
понятно.
>На 25 КВт нужны провода с палец толщиной :-DD. А тут - просто короб с широким ремнем внутри.
ремень - малый ресурс и ненадежно.
А провода - напряжение подыми - вот и ток меньше надо гнать )
Да и провод в палец бкдет не больше того короба весить )
hcube> Но тут корпус уже метра, поэтому нормальный винт туда не влезет.
я не понял, а почему упор на то, что винт не должен выходить за пределы корпуса?
hcube> Крылья, кстати, не съемные, а складные - приведение в готовность - менее 5 минут.
а ты не подумал, что они поверх дверей окажутся? ))
Входить как?
hcube> Как бонус, при более высокой мощности двигателя, конструкция в принципе позволяет сделать конвертоплан типа Оспри - дополнительный узел поворота в крыльях, позволяющий винтами тянуть вверх,
пых )))
Не, столь крепко я не курю ))
знаешь, сколько мучались с автоматизацией переходных режимов? ))
понятно.
>На 25 КВт нужны провода с палец толщиной :-DD. А тут - просто короб с широким ремнем внутри.
ремень - малый ресурс и ненадежно.
А провода - напряжение подыми - вот и ток меньше надо гнать )
Да и провод в палец бкдет не больше того короба весить )
hcube> Но тут корпус уже метра, поэтому нормальный винт туда не влезет.
я не понял, а почему упор на то, что винт не должен выходить за пределы корпуса?
hcube> Крылья, кстати, не съемные, а складные - приведение в готовность - менее 5 минут.
а ты не подумал, что они поверх дверей окажутся? ))
Входить как?
hcube> Как бонус, при более высокой мощности двигателя, конструкция в принципе позволяет сделать конвертоплан типа Оспри - дополнительный узел поворота в крыльях, позволяющий винтами тянуть вверх,
пых )))
Не, столь крепко я не курю ))
знаешь, сколько мучались с автоматизацией переходных режимов? ))
Bredonosec> я не понял, а почему упор на то, что винт не должен выходить за пределы корпуса?
Ну смотри - из соображений нормального угла атаки при взлете/посадке - хвостовая балка - сверху. Гнутой сделать, увы не получится, потому что она еще и убираться должна в корпус, причем так, чтобы стабилизатор на корпус надвинулся. Это дает только один вариант - балка сверху. А винт соответственно тогда должен быть или между балками, или два винта, надетые НА балки. И так и так не очень хорошо.
Если же вынести винты перед крылом - от этого сплошные плюсы - поток воздуха не затеняется корпусом, и поток воздуха проходит через закрылок/элерон крыла, и далее частично через стабилизатор, давая управляемость на сверхнизких скоростях полета - лишь бы движок работал.
Впрочем, можно подумать вариант с нижним размещением выдвижной балки. Получится менее удобно, но никакой принципиальной проблемы так сделать нету.
Bredonosec> ремень - малый ресурс и ненадежно.
Зубчатый ремень ГРМ у меня на Т4 - пробег со смены предыдущего - более 70К, состояние нового. Раз уж сняли - заменил на новый, старый положил в ЗИП
Короб же нужен по любому, потому что он есть элемент конструктивной схемы фюзеляжа - 'перекладина' одного из силовых треугольников. Просто внутри еще и ремень пропущен.
hcube>> Крылья, кстати, не съемные, а складные - приведение в готовность - менее 5 минут.
Bredonosec> а ты не подумал, что они поверх дверей окажутся? ))
Bredonosec> Входить как?
А как в восьмерку/таврию входят? Отклонили спинку переднего сиденья вперед - и залезли. Окошки сбоку есть, если что - пойдет как аварийный выход.
Ну смотри - из соображений нормального угла атаки при взлете/посадке - хвостовая балка - сверху. Гнутой сделать, увы не получится, потому что она еще и убираться должна в корпус, причем так, чтобы стабилизатор на корпус надвинулся. Это дает только один вариант - балка сверху. А винт соответственно тогда должен быть или между балками, или два винта, надетые НА балки. И так и так не очень хорошо.
Если же вынести винты перед крылом - от этого сплошные плюсы - поток воздуха не затеняется корпусом, и поток воздуха проходит через закрылок/элерон крыла, и далее частично через стабилизатор, давая управляемость на сверхнизких скоростях полета - лишь бы движок работал.
Впрочем, можно подумать вариант с нижним размещением выдвижной балки. Получится менее удобно, но никакой принципиальной проблемы так сделать нету.
Bredonosec> ремень - малый ресурс и ненадежно.
Зубчатый ремень ГРМ у меня на Т4 - пробег со смены предыдущего - более 70К, состояние нового. Раз уж сняли - заменил на новый, старый положил в ЗИП
Короб же нужен по любому, потому что он есть элемент конструктивной схемы фюзеляжа - 'перекладина' одного из силовых треугольников. Просто внутри еще и ремень пропущен.
hcube>> Крылья, кстати, не съемные, а складные - приведение в готовность - менее 5 минут.
Bredonosec> а ты не подумал, что они поверх дверей окажутся? ))
Bredonosec> Входить как?
А как в восьмерку/таврию входят? Отклонили спинку переднего сиденья вперед - и залезли. Окошки сбоку есть, если что - пойдет как аварийный выход.
Убей в себе зомби!
Это сообщение редактировалось 06.09.2011 в 02:39
hcube> Ну смотри - из соображений нормального угла атаки при взлете/посадке - хвостовая балка - сверху.
не факт.
>Гнутой сделать, увы не получится, потому что она еще и убираться должна в корпус, причем так, чтобы стабилизатор на корпус надвинулся.
а вот это-то зачем? Шарнир- отклонение вверх - и нормально.
Не нравится, что сверху украшения? А при "вдвижении" они тоже останутся.
hcube> Если же вынести винты перед крылом - от этого сплошные плюсы - поток воздуха не затеняется корпусом, и поток воздуха проходит через закрылок/элерон крыла, и далее частично через стабилизатор, давая управляемость на сверхнизких скоростях полета - лишь бы движок работал.
плюс у этого только в том, что обдув крыла есть. То есть, меньшая инерционность. Дал газ - и сразу У поднялась, не дожидаясь скорости.
А вот сопротивление - наоборот растет. Ибо опять же, энергия струи тратится на сжатие потока перед передней кромкой.
У заднего расположения может быть минус, если поток с винта будет бить по оперению - бафтинг устраивать.. Но с этим борятся достаточно успешно..
hcube> Зубчатый ремень ГРМ у меня на Т4 - пробег со смены предыдущего - более 70К, состояние нового. Раз уж сняли - заменил на новый, старый положил в ЗИП
я знаю нормативы замен )
Просто всё равно лишнее звено, которое может порваться. Нигде не видел привод на винты через ремень.
hcube> Короб же нужен по любому, потому что он есть элемент конструктивной схемы фюзеляжа - 'перекладина' одного из силовых треугольников. Просто внутри еще и ремень пропущен.
эээ... кессон крыла? Лонжероны? Или что?
Вообще-то короб необязателен..
Не понял, кк ты его ставить там решил, чтоб он помогал тебе..
hcube> А как в восьмерку/таврию входят? Отклонили спинку переднего сиденья вперед - и залезли. Окошки сбоку есть, если что - пойдет как аварийный выход.
А что, крыло позади салона? хы.. С центровкой проблемы будут.. Салон строго под крылом должен быть.
не факт.
>Гнутой сделать, увы не получится, потому что она еще и убираться должна в корпус, причем так, чтобы стабилизатор на корпус надвинулся.
а вот это-то зачем? Шарнир- отклонение вверх - и нормально.
Не нравится, что сверху украшения? А при "вдвижении" они тоже останутся.
hcube> Если же вынести винты перед крылом - от этого сплошные плюсы - поток воздуха не затеняется корпусом, и поток воздуха проходит через закрылок/элерон крыла, и далее частично через стабилизатор, давая управляемость на сверхнизких скоростях полета - лишь бы движок работал.
плюс у этого только в том, что обдув крыла есть. То есть, меньшая инерционность. Дал газ - и сразу У поднялась, не дожидаясь скорости.
А вот сопротивление - наоборот растет. Ибо опять же, энергия струи тратится на сжатие потока перед передней кромкой.
У заднего расположения может быть минус, если поток с винта будет бить по оперению - бафтинг устраивать.. Но с этим борятся достаточно успешно..
hcube> Зубчатый ремень ГРМ у меня на Т4 - пробег со смены предыдущего - более 70К, состояние нового. Раз уж сняли - заменил на новый, старый положил в ЗИП
я знаю нормативы замен )
Просто всё равно лишнее звено, которое может порваться. Нигде не видел привод на винты через ремень.
hcube> Короб же нужен по любому, потому что он есть элемент конструктивной схемы фюзеляжа - 'перекладина' одного из силовых треугольников. Просто внутри еще и ремень пропущен.
эээ... кессон крыла? Лонжероны? Или что?
Вообще-то короб необязателен..
Не понял, кк ты его ставить там решил, чтоб он помогал тебе..
hcube> А как в восьмерку/таврию входят? Отклонили спинку переднего сиденья вперед - и залезли. Окошки сбоку есть, если что - пойдет как аварийный выход.
А что, крыло позади салона? хы.. С центровкой проблемы будут.. Салон строго под крылом должен быть.
hcube>> А как в восьмерку/таврию входят? Отклонили спинку переднего сиденья вперед - и залезли. Окошки сбоку есть, если что - пойдет как аварийный выход.
Bredonosec> А что, крыло позади салона? хы.. С центровкой проблемы будут.. Салон строго под крылом должен быть.
Крыло - над средней частью салона, треть хорды - почти точно над пассажирским местом. Назад выдвинут движок (под пассажирским местом), вперед - место пилота. Доступ в салон - через дверь пилота (для упрощения и удешевления, думаю, ее надо делать одну). Доступ на пассажирское место - через ту же дверь, с откидыванием спинки сидения пилота вперед.
Далее, хвостовое оперение хитро складывается, так что в результате оно за габарит 'кубика' машины не выступает вовсе - ну, за колеса - точно. Аналогично и с сложенным крылом - то выступает только вверх, да и то не слишком сильно.
Если же хвостовые балки не вдвигать, а складывать... оперение придется аккурат перед водительским местом и нафиг закроет весь обзор, да еще и аэродинамику испортит. Оно надо?
В переработанном варианте, кстати, я придумал, как сделать теоретически максимальную длину балок - сделать их гнутыми, и использовать эту образующую. Тогда от носа до хвоста будет одна и та же балка с постоянным радиусом изгиба.
Да - КПП не нать. Используем комбинацию 3 муфт и 2 вариатора. 1 муфта подключает сам ДВС - в роли сцепления, фактически. Еще 2 - переключают привод на винт или на колесо. А регулировка оборотов каждого колеса/винта - вариатором на свою сторону.
Bredonosec> А что, крыло позади салона? хы.. С центровкой проблемы будут.. Салон строго под крылом должен быть.
Крыло - над средней частью салона, треть хорды - почти точно над пассажирским местом. Назад выдвинут движок (под пассажирским местом), вперед - место пилота. Доступ в салон - через дверь пилота (для упрощения и удешевления, думаю, ее надо делать одну). Доступ на пассажирское место - через ту же дверь, с откидыванием спинки сидения пилота вперед.
Далее, хвостовое оперение хитро складывается, так что в результате оно за габарит 'кубика' машины не выступает вовсе - ну, за колеса - точно. Аналогично и с сложенным крылом - то выступает только вверх, да и то не слишком сильно.
Если же хвостовые балки не вдвигать, а складывать... оперение придется аккурат перед водительским местом и нафиг закроет весь обзор, да еще и аэродинамику испортит. Оно надо?
В переработанном варианте, кстати, я придумал, как сделать теоретически максимальную длину балок - сделать их гнутыми, и использовать эту образующую. Тогда от носа до хвоста будет одна и та же балка с постоянным радиусом изгиба.
Да - КПП не нать. Используем комбинацию 3 муфт и 2 вариатора. 1 муфта подключает сам ДВС - в роли сцепления, фактически. Еще 2 - переключают привод на винт или на колесо. А регулировка оборотов каждого колеса/винта - вариатором на свою сторону.
Убей в себе зомби!
Это сообщение редактировалось 09.09.2011 в 16:53
hcube> Крыло
если как на рисунке - не полетит.
центровка будет дико передняя.
где-то в районе 0% сах. или еще дальше вперед
hcube> Далее, хвостовое оперение хитро складывается, так что в результате оно за габарит 'кубика' машины не выступает вовсе
и передача усилия - эдсу?
а то тросы-то не поймут такого..
hcube> Если же хвостовые балки не вдвигать, а складывать... оперение придется аккурат перед водительским местом и нафиг закроет весь обзор, да еще и аэродинамику испортит. Оно надо?
с точки внизу за кузовом - никак вперед не дотянется )
а складывание и тут будет к месту ))
hcube> Используем комбинацию 3 муфт и 2 вариатора.
честно говоря, не понял.. ((
если как на рисунке - не полетит.
центровка будет дико передняя.
где-то в районе 0% сах. или еще дальше вперед
hcube> Далее, хвостовое оперение хитро складывается, так что в результате оно за габарит 'кубика' машины не выступает вовсе
и передача усилия - эдсу?
а то тросы-то не поймут такого..
hcube> Если же хвостовые балки не вдвигать, а складывать... оперение придется аккурат перед водительским местом и нафиг закроет весь обзор, да еще и аэродинамику испортит. Оно надо?
с точки внизу за кузовом - никак вперед не дотянется )
а складывание и тут будет к месту ))
hcube> Используем комбинацию 3 муфт и 2 вариатора.
честно говоря, не понял.. ((
hcube>> Крыло
Bredonosec> если как на рисунке - не полетит.
Bredonosec> центровка будет дико передняя.
А ты мотодельты видел? Вперед-то оно выдается прилично - только вот движок и трансмиссия у него - в самом хвосте фюзеляжа, а вперед торчит только легкая рама с пилотом. Так что ЦМ у него 'где надо' - пассажир сидит под ЦМ, а пилот сбалансирован двигателем К тому же крыло - на грани обратной стреловидности, прямое по передней кромке, с обратным наклоном по задней.
Bredonosec> и передача усилия - эдсу?
Я думаю, да. К тому же, ЭДСУ позволит сделать еще одну штуку - автопилот, который будет следить за безопасностью полета. Ну и - резервированная ЭДСУ, то есть используется много (по 2 на руль направления и по 3 на элерон, на РВ в перекладине оперения - один) относительно дохлых приводов вместо одного мощного. Ну, или еще можно пневматику + электроуправляемые клапаны.
Bredonosec> с точки внизу за кузовом - никак вперед не дотянется )
Bredonosec> а складывание и тут будет к месту ))
Не, оно там весьма прилично назад вынесено. А хочется, чтобы балка назад в автомобильном варианте ВООБЩЕ не торчала за задние колеса. Да и хоть сколько-то надо оставить на перекрытие - чтобы усилие в балке нормально передавалось. И горизонтальное хвостовое оперение хочется вдвинуть полностью - а это еще в минус длины. Наверное, надо делать пакет в 3 слоя - кили - крыло-крыло. Кили обтекают зауженную хвостовую часть вплоть до высовывающихся цилиндров двигателя.
hcube>> Используем комбинацию 3 муфт и 2 вариатора.
Bredonosec> честно говоря, не понял.. ((
ДВС - муфта(сцепление) - электродвигатель - 2х вариатор - 2х муфта - винты/задние колеса
Bredonosec> если как на рисунке - не полетит.
Bredonosec> центровка будет дико передняя.
А ты мотодельты видел? Вперед-то оно выдается прилично - только вот движок и трансмиссия у него - в самом хвосте фюзеляжа, а вперед торчит только легкая рама с пилотом. Так что ЦМ у него 'где надо' - пассажир сидит под ЦМ, а пилот сбалансирован двигателем
К тому же крыло - на грани обратной стреловидности, прямое по передней кромке, с обратным наклоном по задней.Bredonosec> и передача усилия - эдсу?
Я думаю, да. К тому же, ЭДСУ позволит сделать еще одну штуку - автопилот, который будет следить за безопасностью полета. Ну и - резервированная ЭДСУ, то есть используется много (по 2 на руль направления и по 3 на элерон, на РВ в перекладине оперения - один) относительно дохлых приводов вместо одного мощного. Ну, или еще можно пневматику + электроуправляемые клапаны.
Bredonosec> с точки внизу за кузовом - никак вперед не дотянется )
Bredonosec> а складывание и тут будет к месту ))
Не, оно там весьма прилично назад вынесено. А хочется, чтобы балка назад в автомобильном варианте ВООБЩЕ не торчала за задние колеса. Да и хоть сколько-то надо оставить на перекрытие - чтобы усилие в балке нормально передавалось. И горизонтальное хвостовое оперение хочется вдвинуть полностью - а это еще в минус длины. Наверное, надо делать пакет в 3 слоя - кили - крыло-крыло. Кили обтекают зауженную хвостовую часть вплоть до высовывающихся цилиндров двигателя.
hcube>> Используем комбинацию 3 муфт и 2 вариатора.
Bredonosec> честно говоря, не понял.. ((
ДВС - муфта(сцепление) - электродвигатель - 2х вариатор - 2х муфта - винты/задние колеса
Убей в себе зомби!
hcube> А ты мотодельты видел? Вперед-то оно выдается прилично - только вот движок и трансмиссия у него - в самом хвосте фюзеляжа, а вперед торчит только легкая рама с пилотом.
видел. Сидел в них. Пилот под крылом. Жопа его - где-то на уровне 0.25-0.3 сах. То есть, где нужно. Двигло от его жопы отстоит где-то сантиметров на 30 по расстоянию горизонтальному.
То есть, всё примерно там же.
Вперед выступает только легкий конус обтекателя и ноги пилота.
>Так что ЦМ у него 'где надо' - пассажир сидит под ЦМ, а пилот сбалансирован двигателем К тому же крыло - на грани обратной стреловидности, прямое по передней кромке, с обратным наклоном по задней.
Всё равно. Даже обратная стреловидность - складываясь-то будет вперед закрывать. При любом раскладе крыло будет закрывать дверцы.
А если делать противовесы - впереди жопы, сзади двигло - будет дикий разброс центровок. И сам убьёшься, полетев с полным салоном, или наоборот, в одиночку (слишком передняя или слишком задняя). У нас вон года 2 назад владелец летной школы Лапенас, известный пилотажник, убился похоже.. На автожире на малой высоте кабрирование больше дали - рухнули. Ничего сделать не успели, погибли оба.
hcube> Я думаю, да. К тому же, ЭДСУ позволит сделать еще одну штуку - автопилот, который будет следить за безопасностью полета. Ну и - резервированная ЭДСУ, то есть используется много (по 2 на руль направления и по 3 на элерон, на РВ в перекладине оперения - один) относительно дохлых приводов вместо одного мощного. Ну, или еще можно пневматику + электроуправляемые клапаны.
имхо, ты тут уже переусложняешь. На столь мелком аппарате оно лишнее.
ЭДСУ будет чем управлять? Электроприводами? Или гидроприводами? Или чем?
Гидрашку на СЛА ставить маразм. Тяги за глаза там. Пневмо - тоже совершенно лишнее утяжеление и усложнение конструкции. Электроприводы на большие отклонения не слишком быстродейственны.. То есть, АП сделать для спокойного воздуха на них можно, но в термиках, где бросает как пушинку, - недостаточно. Там на полные амплитуды шуруешь.
hcube> Не, оно там весьма прилично назад вынесено. А хочется, чтобы балка назад в автомобильном варианте ВООБЩЕ не торчала за задние колеса.
ну, можно вспомнит ь, что крыло само по себе имеет толщину, и при складывании на полметра будет выделяться в стороны за кузов А уж если приводы винтов с редукторами внутри... ))
>Да и хоть сколько-то надо оставить на перекрытие - чтобы усилие в балке нормально передавалось.
зачем? Торцевое соединение достаточно прочное. Вон балки хвостовые сколько машин так складывают. Что на вертушках, что.. Да вон на предшественнике белуги хвост вбок откидывался..
>И горизонтальное хвостовое оперение хочется вдвинуть полностью
Не думаю, что конструкция будет надежной.
hcube> ДВС - муфта(сцепление) - электродвигатель - 2х вариатор - 2х муфта - винты/задние колеса
прочел про вариатор -
для самолета веса много..
Тем более, если их несколько.
видел. Сидел в них. Пилот под крылом. Жопа его - где-то на уровне 0.25-0.3 сах. То есть, где нужно. Двигло от его жопы отстоит где-то сантиметров на 30 по расстоянию горизонтальному.
То есть, всё примерно там же.
Вперед выступает только легкий конус обтекателя и ноги пилота.
>Так что ЦМ у него 'где надо' - пассажир сидит под ЦМ, а пилот сбалансирован двигателем
К тому же крыло - на грани обратной стреловидности, прямое по передней кромке, с обратным наклоном по задней.Всё равно. Даже обратная стреловидность - складываясь-то будет вперед закрывать. При любом раскладе крыло будет закрывать дверцы.
А если делать противовесы - впереди жопы, сзади двигло - будет дикий разброс центровок. И сам убьёшься, полетев с полным салоном, или наоборот, в одиночку (слишком передняя или слишком задняя). У нас вон года 2 назад владелец летной школы Лапенас, известный пилотажник, убился похоже.. На автожире на малой высоте кабрирование больше дали - рухнули. Ничего сделать не успели, погибли оба.
hcube> Я думаю, да. К тому же, ЭДСУ позволит сделать еще одну штуку - автопилот, который будет следить за безопасностью полета. Ну и - резервированная ЭДСУ, то есть используется много (по 2 на руль направления и по 3 на элерон, на РВ в перекладине оперения - один) относительно дохлых приводов вместо одного мощного. Ну, или еще можно пневматику + электроуправляемые клапаны.
имхо, ты тут уже переусложняешь. На столь мелком аппарате оно лишнее.
ЭДСУ будет чем управлять? Электроприводами? Или гидроприводами? Или чем?
Гидрашку на СЛА ставить маразм. Тяги за глаза там. Пневмо - тоже совершенно лишнее утяжеление и усложнение конструкции. Электроприводы на большие отклонения не слишком быстродейственны.. То есть, АП сделать для спокойного воздуха на них можно, но в термиках, где бросает как пушинку, - недостаточно. Там на полные амплитуды шуруешь.
hcube> Не, оно там весьма прилично назад вынесено. А хочется, чтобы балка назад в автомобильном варианте ВООБЩЕ не торчала за задние колеса.
ну, можно вспомнит ь, что крыло само по себе имеет толщину, и при складывании на полметра будет выделяться в стороны за кузов
А уж если приводы винтов с редукторами внутри... )) >Да и хоть сколько-то надо оставить на перекрытие - чтобы усилие в балке нормально передавалось.
зачем? Торцевое соединение достаточно прочное. Вон балки хвостовые сколько машин так складывают. Что на вертушках, что.. Да вон на предшественнике белуги хвост вбок откидывался..
>И горизонтальное хвостовое оперение хочется вдвинуть полностью
Не думаю, что конструкция будет надежной.
hcube> ДВС - муфта(сцепление) - электродвигатель - 2х вариатор - 2х муфта - винты/задние колеса
прочел про вариатор -
для самолета веса много..
Тем более, если их несколько.
Bredonosec> видел. Сидел в них. Пилот под крылом. Жопа его - где-то на уровне 0.25-0.3 сах. То есть, где нужно. Двигло от его жопы отстоит где-то сантиметров на 30 по расстоянию горизонтальному.
Это если одноместный. А в двухместном пилот с пассажиром сидят уступом - пилот практически под носком крыла. Тут крыло прямое и относительно узкое, так что IMHO на дверцу хватит.
Bredonosec> Всё равно. Даже обратная стреловидность - складываясь-то будет вперед закрывать. При любом раскладе крыло будет закрывать дверцы.
Ну, там возможны варианты... например, дделать оси складывания крыла не паралельными продольной оси - тогда оно 'сложится' вниз-и-назад.
Bredonosec> А если делать противовесы - впереди жопы, сзади двигло - будет дикий разброс центровок.
Ну ты все-таки попу с пальцем не путай. Где автожир/мотодельт, а где самолет классической схемы. Там и оперение есть, и крыло на бОльших углах атаки может работать, и V-образность крыла... да и ЦМ за счет движка находится довольно низко.
Bredonosec> имхо, ты тут уже переусложняешь. На столь мелком аппарате оно лишнее.
Bredonosec> ЭДСУ будет чем управлять? Электроприводами? Или гидроприводами? Или чем?
Либо электро, либо пневмо. Электро лучше 'прямым' управлением, пневмо - бОльшей скоростью отработки.
Почему несколько приводов - это может оказаться дешевле, чем минимальное количество РАЗНЫХ БОЛЬШИХ приводов. Кроме того, при минимальном уровне контроля, пачка мелких приводов будет иметь бОльшую надежность - при отказе одного, нагрузка перераспределится на другие.
> быстродейственны.. То есть, АП сделать для спокойного воздуха на них можно, но в термиках, где бросает как пушинку, - недостаточно. Там на полные амплитуды шуруешь.
Ну, во-первых, сам самолет статически устойчив. То есть возмущения его всего лишь положат в правую или левую спираль. Во-вторых, банальные рулевые машинки для авиамоделей имеют скорость перекладки на 90 градусов в 0.15 секунды для мелких и 0.5 для больших. Экстраполируя, аналогичная штуковина с плечом сантиметров 10 и усилием килограммов 20, будет иметь постоянную в ремени в 1-2 секунды.
Bredonosec> ну, можно вспомнит ь, что крыло само по себе имеет толщину, и при складывании на полметра будет выделяться в стороны за кузов А уж если приводы винтов с редукторами внутри... ))
Крыло - будет. Для этого и используется 'баггийное' шасси - чтобы крыло не выступало за габарит шасси. При этом абсолютный габарит будет не так уж и велик - два складывания крыла добавляют... ну, сантимеров 40-60 к ширине автомобиля. Как раз разница между микроавтобусом и мелким хэчбэком типа того же матиса. А он, все-таки, четырехместный.
Bredonosec> зачем? Торцевое соединение достаточно прочное. Вон балки хвостовые сколько машин так складывают. Что на вертушках, что.. Да вон на предшественнике белуги хвост вбок откидывался..
Тогда балка должна быть толстой. С сечением, сопоставимым с длиной. Или прочный-и-тяжелый узел стыка нужен.
Bredonosec> Не думаю, что конструкция будет надежной.
Удочки ненадежны? Там будет примерно то же - две области сопряжения, которые как раз и передают момент. Там же, кстати, и крыло будет закреплено - можно двух зайцев убить.
Надо попробовать натырить угольных прутков и изобразить силовую схему крыла, хвоста и фюзеляжа.
Bredonosec> прочел про вариатор -
Bredonosec> Как устроен вариатор
Bredonosec> для самолета веса много..
Ну, в теории можно наверное два согласованно работающих автомата.
Но с вариатором сразу уходит КПП, уходят ШРУСы, и прочее, прочее.
Можно попробовать передачу Гулиа - он тоже что-то такое изображал для зарядки супермаховиков.
Это если одноместный. А в двухместном пилот с пассажиром сидят уступом - пилот практически под носком крыла. Тут крыло прямое и относительно узкое, так что IMHO на дверцу хватит.
Bredonosec> Всё равно. Даже обратная стреловидность - складываясь-то будет вперед закрывать. При любом раскладе крыло будет закрывать дверцы.
Ну, там возможны варианты... например, дделать оси складывания крыла не паралельными продольной оси - тогда оно 'сложится' вниз-и-назад.
Bredonosec> А если делать противовесы - впереди жопы, сзади двигло - будет дикий разброс центровок.
Ну ты все-таки попу с пальцем не путай. Где автожир/мотодельт, а где самолет классической схемы. Там и оперение есть, и крыло на бОльших углах атаки может работать, и V-образность крыла... да и ЦМ за счет движка находится довольно низко.
Bredonosec> имхо, ты тут уже переусложняешь. На столь мелком аппарате оно лишнее.
Bredonosec> ЭДСУ будет чем управлять? Электроприводами? Или гидроприводами? Или чем?
Либо электро, либо пневмо. Электро лучше 'прямым' управлением, пневмо - бОльшей скоростью отработки.
Почему несколько приводов - это может оказаться дешевле, чем минимальное количество РАЗНЫХ БОЛЬШИХ приводов. Кроме того, при минимальном уровне контроля, пачка мелких приводов будет иметь бОльшую надежность - при отказе одного, нагрузка перераспределится на другие.
> быстродейственны.. То есть, АП сделать для спокойного воздуха на них можно, но в термиках, где бросает как пушинку, - недостаточно. Там на полные амплитуды шуруешь.
Ну, во-первых, сам самолет статически устойчив. То есть возмущения его всего лишь положат в правую или левую спираль. Во-вторых, банальные рулевые машинки для авиамоделей имеют скорость перекладки на 90 градусов в 0.15 секунды для мелких и 0.5 для больших. Экстраполируя, аналогичная штуковина с плечом сантиметров 10 и усилием килограммов 20, будет иметь постоянную в ремени в 1-2 секунды.
Bredonosec> ну, можно вспомнит ь, что крыло само по себе имеет толщину, и при складывании на полметра будет выделяться в стороны за кузов
А уж если приводы винтов с редукторами внутри... )) Крыло - будет. Для этого и используется 'баггийное' шасси - чтобы крыло не выступало за габарит шасси. При этом абсолютный габарит будет не так уж и велик - два складывания крыла добавляют... ну, сантимеров 40-60 к ширине автомобиля. Как раз разница между микроавтобусом и мелким хэчбэком типа того же матиса. А он, все-таки, четырехместный
.Bredonosec> зачем? Торцевое соединение достаточно прочное. Вон балки хвостовые сколько машин так складывают. Что на вертушках, что.. Да вон на предшественнике белуги хвост вбок откидывался..
Тогда балка должна быть толстой. С сечением, сопоставимым с длиной. Или прочный-и-тяжелый узел стыка нужен.
Bredonosec> Не думаю, что конструкция будет надежной.
Удочки ненадежны?
Там будет примерно то же - две области сопряжения, которые как раз и передают момент. Там же, кстати, и крыло будет закреплено - можно двух зайцев убить. Надо попробовать натырить угольных прутков и изобразить силовую схему крыла, хвоста и фюзеляжа.
Bredonosec> прочел про вариатор -
Bredonosec> Как устроен вариатор
Bredonosec> для самолета веса много..
Ну, в теории можно наверное два согласованно работающих автомата.
Но с вариатором сразу уходит КПП, уходят ШРУСы, и прочее, прочее.
Можно попробовать передачу Гулиа - он тоже что-то такое изображал для зарядки супермаховиков.
Убей в себе зомби!
hcube> Это если одноместный. А в двухместном пилот с пассажиром сидят уступом
Мелкие самолеты погляди.
Салон целиком над/под крылом.
hcube> Ну, там возможны варианты... например, дделать оси складывания крыла не паралельными продольной оси - тогда оно 'сложится' вниз-и-назад.
можно, да. Но тогда ширина еще больше вырастет. И твой авто будет занимать больше чем автобус по ширине..
hcube> Ну ты все-таки попу с пальцем не путай. Где автожир/мотодельт, а где самолет классической схемы. Там и оперение есть, и крыло на бОльших углах атаки может работать, и V-образность крыла... да и ЦМ за счет движка находится довольно низко.
Всё равно разброс центровок - это оочень нехорошая штука. И наличие вынесенного далеко назад ГО - не панацея. Стабилизирующего момента может не хватить. Или потери будут несоразмерно велики - будешь терять слишком много У или получать много лишнего Х.
И на критических стадиях полета всё равно иметь проблемы нехватки рулей, клевка, или невыхода из штопора.
hcube> Почему несколько приводов - это может оказаться дешевле, чем минимальное количество РАЗНЫХ БОЛЬШИХ приводов. Кроме того, при минимальном уровне контроля, пачка мелких приводов будет иметь бОльшую надежность - при отказе одного, нагрузка перераспределится на другие.
В корне неверно.
Поясняю. Привод обязан передавать максимум усилия на плоскость, но иметь минимальную обратную связь, иначе будем иметь свободно подвешенное, а не фиксированное, что ни управляемости, ни стабильности, ни по флаттерным характеристикам, оптимизма не добавит.
Отсюда принцип действия. (фотку мне присылали на вк год назад, вместе с его АЧХ, но не нахожу)
Электрический привод - это червячная передача - шток с нанесенной резьбой движется туда-обратно под воздействием мелких шестеренок, цепляющих зубцы его резьбы. Шестеренки вращаются эл.двигателем.
В итоге, отказ одного из приводов (сдохло двигло, к примеру. Самое простое) приводит к положению "орган управления заклинило". То есть, самому неприятному варианту.
Никакого открытия клапанов, как на гидрашке, тут не предусмотрено. Шток крепится к органу управления непосредственно.
То есть, тут дублирование только снизит надежность.
Про вес и не говорю.
hcube> Ну, во-первых, сам самолет статически устойчив. То есть возмущения его всего лишь положат в правую или левую спираль.
Куб, что-то ты не того рассказываешь )))
Ты летал на мелочи в жаркую погоду?
Я ж по собственному опыту говорю. ))) Особенно над населенными пунктами (горячие железные крышы - это пипец просто) - швыряет и ставит раком непрерывно. Всё, что в салоне непривязано - летает. Авторучка из кармана дверцы как-то вылетела, поплясала перед глазами, и рванула куда-то в дальний угол салона. И для компенсации - шуруешь рулями на полную амплитуду. Тогда машинка более-менее как надо летит. Если боишься и вяло реагируешь - танцуешь как говно в проруби.
>Во-вторых, банальные рулевые машинки для авиамоделей имеют скорость перекладки на 90 градусов в 0.15 секунды для мелких и 0.5 для больших. Экстраполируя, аналогичная штуковина с плечом сантиметров 10 и усилием килограммов 20, будет иметь постоянную в ремени в 1-2 секунды.
Усилие тебе потребуется больше.
Время перекладки ты примерно близкое указал - там что-то подобное было. И 7 герц максимально на смену положения в пределах 5% амплитуды.
Вот только 1-2 секунды - это оочень медленно. Такая реакция допустима для большого лайнера с его инерцией, но для легкой птички - нет.
hcube> Крыло - будет. Для этого и используется 'баггийное' шасси - чтобы крыло не выступало за габарит шасси. При этом абсолютный габарит будет не так уж и велик - два складывания крыла добавляют... ну, сантимеров 40-60 к ширине автомобиля. Как раз разница между микроавтобусом и мелким хэчбэком типа того же матиса. А он, все-таки, четырехместный.
я таки настаиваю - по полметра с каждой стороны
Потому как складывать придется в 3 приема. Строительная высота крыла - порядка 15 см.
То, что у тебя колеса будут расставлены шире,- не сократит ширину авто. Только добавит веса подвеске и снизит надежность её.
hcube> Тогда балка должна быть толстой. С сечением, сопоставимым с длиной. Или прочный-и-тяжелый узел стыка нужен.
необязательно. Ни первое ни второе.
Балка может быть такой же, как и без узла. Главное условие - чтоб она сама выдерживали нагрузки.
В области узла локальное усиление (напр, намотка еще миллиметра стеклоткани в слой) перед плиткой торцового разьёма. Сама плитка - напр, 5мм шайба из дюраля, сечения 4-гранной скругленной звезды. Или просто квадрата (на круглую балку тоже) - с одной грани петли, с другой - 2 винта или защелки. Винты надежнее )
hcube> Удочки ненадежны? Там будет примерно то же - две области сопряжения, которые как раз и передают момент. Там же, кстати, и крыло будет закреплено - можно двух зайцев убить.
менее надежно, нежели простое складывание Просто потому, что локальное давление в разных точках дается. Конструкция будет получать деформации, невидимые до поломки.
hcube> Ну, в теории можно наверное два согласованно работающих автомата.
хз..
hcube> Но с вариатором сразу уходит КПП, уходят ШРУСы, и прочее, прочее.
так вариатор и есть кпп )))
а от гранат не откажешься, или же ни о какой пружинной подвеске, ни о каких поворотных колесах речи нет )
hcube> Можно попробовать передачу Гулиа - он тоже что-то такое изображал для зарядки супермаховиков.
не знаю, о чем речь.
Мелкие самолеты погляди.
Салон целиком над/под крылом.
hcube> Ну, там возможны варианты... например, дделать оси складывания крыла не паралельными продольной оси - тогда оно 'сложится' вниз-и-назад.
можно, да. Но тогда ширина еще больше вырастет. И твой авто будет занимать больше чем автобус по ширине..
hcube> Ну ты все-таки попу с пальцем не путай. Где автожир/мотодельт, а где самолет классической схемы. Там и оперение есть, и крыло на бОльших углах атаки может работать, и V-образность крыла... да и ЦМ за счет движка находится довольно низко.
Всё равно разброс центровок - это оочень нехорошая штука. И наличие вынесенного далеко назад ГО - не панацея. Стабилизирующего момента может не хватить. Или потери будут несоразмерно велики - будешь терять слишком много У или получать много лишнего Х.
И на критических стадиях полета всё равно иметь проблемы нехватки рулей, клевка, или невыхода из штопора.
hcube> Почему несколько приводов - это может оказаться дешевле, чем минимальное количество РАЗНЫХ БОЛЬШИХ приводов. Кроме того, при минимальном уровне контроля, пачка мелких приводов будет иметь бОльшую надежность - при отказе одного, нагрузка перераспределится на другие.
В корне неверно.
Поясняю. Привод обязан передавать максимум усилия на плоскость, но иметь минимальную обратную связь, иначе будем иметь свободно подвешенное, а не фиксированное, что ни управляемости, ни стабильности, ни по флаттерным характеристикам, оптимизма не добавит.
Отсюда принцип действия. (фотку мне присылали на вк год назад, вместе с его АЧХ, но не нахожу)
Электрический привод - это червячная передача - шток с нанесенной резьбой движется туда-обратно под воздействием мелких шестеренок, цепляющих зубцы его резьбы. Шестеренки вращаются эл.двигателем.
В итоге, отказ одного из приводов (сдохло двигло, к примеру. Самое простое) приводит к положению "орган управления заклинило". То есть, самому неприятному варианту.
Никакого открытия клапанов, как на гидрашке, тут не предусмотрено. Шток крепится к органу управления непосредственно.
То есть, тут дублирование только снизит надежность.
Про вес и не говорю.
hcube> Ну, во-первых, сам самолет статически устойчив. То есть возмущения его всего лишь положат в правую или левую спираль.
Куб, что-то ты не того рассказываешь )))
Ты летал на мелочи в жаркую погоду?
Я ж по собственному опыту говорю. ))) Особенно над населенными пунктами (горячие железные крышы - это пипец просто) - швыряет и ставит раком непрерывно. Всё, что в салоне непривязано - летает. Авторучка из кармана дверцы как-то вылетела, поплясала перед глазами, и рванула куда-то в дальний угол салона. И для компенсации - шуруешь рулями на полную амплитуду. Тогда машинка более-менее как надо летит. Если боишься и вяло реагируешь - танцуешь как говно в проруби.
>Во-вторых, банальные рулевые машинки для авиамоделей имеют скорость перекладки на 90 градусов в 0.15 секунды для мелких и 0.5 для больших. Экстраполируя, аналогичная штуковина с плечом сантиметров 10 и усилием килограммов 20, будет иметь постоянную в ремени в 1-2 секунды.
Усилие тебе потребуется больше.
Время перекладки ты примерно близкое указал - там что-то подобное было. И 7 герц максимально на смену положения в пределах 5% амплитуды.
Вот только 1-2 секунды - это оочень медленно. Такая реакция допустима для большого лайнера с его инерцией, но для легкой птички - нет.
hcube> Крыло - будет. Для этого и используется 'баггийное' шасси - чтобы крыло не выступало за габарит шасси. При этом абсолютный габарит будет не так уж и велик - два складывания крыла добавляют... ну, сантимеров 40-60 к ширине автомобиля. Как раз разница между микроавтобусом и мелким хэчбэком типа того же матиса. А он, все-таки, четырехместный
.я таки настаиваю - по полметра с каждой стороны
Потому как складывать придется в 3 приема. Строительная высота крыла - порядка 15 см.
То, что у тебя колеса будут расставлены шире,- не сократит ширину авто. Только добавит веса подвеске и снизит надежность её.
hcube> Тогда балка должна быть толстой. С сечением, сопоставимым с длиной. Или прочный-и-тяжелый узел стыка нужен.
необязательно. Ни первое ни второе.
Балка может быть такой же, как и без узла. Главное условие - чтоб она сама выдерживали нагрузки.
В области узла локальное усиление (напр, намотка еще миллиметра стеклоткани в слой) перед плиткой торцового разьёма. Сама плитка - напр, 5мм шайба из дюраля, сечения 4-гранной скругленной звезды. Или просто квадрата (на круглую балку тоже) - с одной грани петли, с другой - 2 винта или защелки. Винты надежнее )
hcube> Удочки ненадежны?
Там будет примерно то же - две области сопряжения, которые как раз и передают момент. Там же, кстати, и крыло будет закреплено - можно двух зайцев убить. менее надежно, нежели простое складывание
Просто потому, что локальное давление в разных точках дается. Конструкция будет получать деформации, невидимые до поломки. hcube> Ну, в теории можно наверное два согласованно работающих автомата.
хз..
hcube> Но с вариатором сразу уходит КПП, уходят ШРУСы, и прочее, прочее.
так вариатор и есть кпп )))
а от гранат не откажешься, или же ни о какой пружинной подвеске, ни о каких поворотных колесах речи нет )
hcube> Можно попробовать передачу Гулиа - он тоже что-то такое изображал для зарядки супермаховиков.
не знаю, о чем речь.
hcube>> Это если одноместный. А в двухместном пилот с пассажиром сидят уступом
Bredonosec> Мелкие самолеты погляди.
Bredonosec> Салон целиком над/под крылом.
Ну да, Сигма та же. Но там все-таки пилот и пассажир сидят РЯДОМ. А в 'телеге' мотодельта - пилот выдвинут вперед. С точки зрения аэродинамики - более узкий фюзеляж предпочтительнее.
То есть по сути, вопрос только в том, можно ли втиснуть дверь И хорду крыла между передним и задним колесами, если грубо формулировать.
Считаем Типовая длина автомобиля - от 3.5 до 5 метров. Допустим, у нас 4. Колеса размещены максимально близко к оконечностям (чтобы не сказать, что они и ЕСТЬ оконечности ). Диметр колес - по полметра - см. фотку багги. Минус метр. Осталось 3 метра. Думаю, метровой ширины крылу с размахом в 7 метров вполне хватит? Остается 2 метра. Чего более чем достаточно для размещения двери... даже можно на полметра длину ужать, пожалуй.
Bredonosec> Всё равно разброс центровок - это оочень нехорошая штука.
А никто и не спорит. Центровку надо делать правильно, для этого - пилота двигать по максимуму назад... или лучше - сделать ему передвижное сиденье с отметками '70кг', '80кг', '100кг', чтобы самобалансировался изменением плеча.
Bredonosec> Электрический привод - это червячная передача - шток с нанесенной резьбой движется туда-обратно под воздействием мелких шестеренок, цепляющих зубцы его резьбы. Шестеренки вращаются эл.двигателем.
Ну да, где-то так. В авиамодельных используется чисто вращение, многоступенчатый редуктор - и дальше через поворотное плечо и тягу идет передача усилия.
Но если уж привод разрабатывать с нуля... я бы делал так - БК двигатель, на оси - одноступенчатый волновой редкутор. И дальше - электромагнитная муфта с двумя устойчивыми состояниями. Нормально работает движок с редуктором, если движок накирнется или редуктор заклинит - перещелкиваем муфту и освобождаем плоскость в свободное движение. Привод размещен прямо на оси поворота плоскости, вместо одного из подшипников.
Bredonosec> То есть, тут дублирование только снизит надежность.
Bredonosec> Про вес и не говорю.
Вес - нет. Не те масштабы. Надежность - тоже нет, даже если привод остается заклиненным, то это можно компенсировать работой соседних приводов. Ну, точнее всего комплекса, потому что если 2 плоскости встанут врастопырку - то возникнет момент по курсу, который придется или рулями компенсировать, или растопыркой с другой стороны.
Bredonosec> Куб, что-то ты не того рассказываешь )))
Bredonosec> Ты летал на мелочи в жаркую погоду?
Да знаю я, что такое термики Я имел в виду, что самолет в отличии от мотодельта или автожира, нельзя 'свалить' в штопор, если он статически устойчив. Ну, по крайней мере, весьма сложно - после импульсных возмущений он сам обратно выравнивается, для этого не надо активно работать рулями.
> Тогда машинка более-менее как надо летит. Если боишься и вяло реагируешь - танцуешь как говно в проруби.
Но летит, заметь!
Bredonosec> я таки настаиваю - по полметра с каждой стороны
Bredonosec> Потому как складывать придется в 3 приема. Строительная высота крыла - порядка 15 см.
Почему в 3? В два. Сверху вниз, поттом снизу вверх, концы крыльев над крышей немного торчат. На четырехместной машинке можно еще концевые части крыла сложить поверх крыши, это даст еще с метр размаха. У корня - 20 см, в точке шарнира - 15, на конце - 10-7. Плюс еще 5 см на раму подкоса, которая складывается между крылом и корпусом. Движки (а точнее, выступы крыла с концевой частью ременной петли) - уходят в выборку в корпусе на уровне сидения, лопасти винта - туда же. Ну, я готов согласиться на 35см... ну, на 40. Но не больше.
40х2 - 80 см. Мой Т4 по зеркалам - 2 метра, по корпусу - 1.85. Вычитаем 80 см, получаем 1.05 - для посадки одного ряда пассажиров вполне достаточно. Для четырехместного, действительно, придется откуда-то родить еще полметра минимум.
Bredonosec> То, что у тебя колеса будут расставлены шире,- не сократит ширину авто. Только добавит веса подвеске и снизит надежность её.
Нифига Рычаги подвески + колесо и так имеют ширину с полметра примерно. То есть узлы их крепления к корпусу располагаются на метр - 80 см друг от друга. Ну, опять же, судя по моему Т4 Задняя чуть посложнее - там аммортизатор на корпус опирается. Ну да не суть важно.
Рычаги подвески + колесо и так имеют ширину с полметра примерно. То есть узлы их крепления к корпусу располагаются на метр - 80 см друг от друга. Ну, опять же, судя по моему Т4 Задняя чуть посложнее - там аммортизатор на корпус опирается. Ну да не суть важно.
Причем короче ты их не сделаешь, потому что тогда вертикальный ход подвески будет меньше - а при посадке это важно. Говорю же - в качестве прототипа и источника запчастей - багги - самое то И прочие жужики.
Bredonosec> менее надежно, нежели простое складывание Просто потому, что локальное давление в разных точках дается. Конструкция будет получать деформации, невидимые до поломки.
Не, ну местное усиление, ессно, никто не отменял. Но складывание все-таки больно уж неудобно получается - балка длинная.
Bredonosec> а от гранат не откажешься, или же ни о какой пружинной подвеске, ни о каких поворотных колесах речи нет )
Ну, передние колеса неприводные. А взлет по любому производится на тяге винтов, а не колес - то есть муфта перещелкивается ДО взлета и ПОСЛЕ посадки.
Bredonosec> Мелкие самолеты погляди.
Bredonosec> Салон целиком над/под крылом.
Ну да, Сигма та же. Но там все-таки пилот и пассажир сидят РЯДОМ. А в 'телеге' мотодельта - пилот выдвинут вперед. С точки зрения аэродинамики - более узкий фюзеляж предпочтительнее.
То есть по сути, вопрос только в том, можно ли втиснуть дверь И хорду крыла между передним и задним колесами, если грубо формулировать.
Считаем
Типовая длина автомобиля - от 3.5 до 5 метров. Допустим, у нас 4. Колеса размещены максимально близко к оконечностям (чтобы не сказать, что они и ЕСТЬ оконечности ). Диметр колес - по полметра - см. фотку багги. Минус метр. Осталось 3 метра. Думаю, метровой ширины крылу с размахом в 7 метров вполне хватит? Остается 2 метра. Чего более чем достаточно для размещения двери... даже можно на полметра длину ужать, пожалуй.Bredonosec> Всё равно разброс центровок - это оочень нехорошая штука.
А никто и не спорит. Центровку надо делать правильно, для этого - пилота двигать по максимуму назад... или лучше - сделать ему передвижное сиденье с отметками '70кг', '80кг', '100кг', чтобы самобалансировался изменением плеча.
Bredonosec> Электрический привод - это червячная передача - шток с нанесенной резьбой движется туда-обратно под воздействием мелких шестеренок, цепляющих зубцы его резьбы. Шестеренки вращаются эл.двигателем.
Ну да, где-то так. В авиамодельных используется чисто вращение, многоступенчатый редуктор - и дальше через поворотное плечо и тягу идет передача усилия.
Но если уж привод разрабатывать с нуля... я бы делал так - БК двигатель, на оси - одноступенчатый волновой редкутор. И дальше - электромагнитная муфта с двумя устойчивыми состояниями. Нормально работает движок с редуктором, если движок накирнется или редуктор заклинит - перещелкиваем муфту и освобождаем плоскость в свободное движение. Привод размещен прямо на оси поворота плоскости, вместо одного из подшипников.
Bredonosec> То есть, тут дублирование только снизит надежность.
Bredonosec> Про вес и не говорю.
Вес - нет. Не те масштабы. Надежность - тоже нет, даже если привод остается заклиненным, то это можно компенсировать работой соседних приводов. Ну, точнее всего комплекса, потому что если 2 плоскости встанут врастопырку - то возникнет момент по курсу, который придется или рулями компенсировать, или растопыркой с другой стороны.
Bredonosec> Куб, что-то ты не того рассказываешь )))
Bredonosec> Ты летал на мелочи в жаркую погоду?
Да знаю я, что такое термики
Я имел в виду, что самолет в отличии от мотодельта или автожира, нельзя 'свалить' в штопор, если он статически устойчив. Ну, по крайней мере, весьма сложно - после импульсных возмущений он сам обратно выравнивается, для этого не надо активно работать рулями.> Тогда машинка более-менее как надо летит. Если боишься и вяло реагируешь - танцуешь как говно в проруби.
Но летит, заметь!
Bredonosec> я таки настаиваю - по полметра с каждой стороны
Bredonosec> Потому как складывать придется в 3 приема. Строительная высота крыла - порядка 15 см.
Почему в 3? В два. Сверху вниз, поттом снизу вверх, концы крыльев над крышей немного торчат. На четырехместной машинке можно еще концевые части крыла сложить поверх крыши, это даст еще с метр размаха. У корня - 20 см, в точке шарнира - 15, на конце - 10-7. Плюс еще 5 см на раму подкоса, которая складывается между крылом и корпусом. Движки (а точнее, выступы крыла с концевой частью ременной петли) - уходят в выборку в корпусе на уровне сидения, лопасти винта - туда же. Ну, я готов согласиться на 35см... ну, на 40. Но не больше.
40х2 - 80 см. Мой Т4 по зеркалам - 2 метра, по корпусу - 1.85. Вычитаем 80 см, получаем 1.05 - для посадки одного ряда пассажиров вполне достаточно. Для четырехместного, действительно, придется откуда-то родить еще полметра минимум
. Bredonosec> То, что у тебя колеса будут расставлены шире,- не сократит ширину авто. Только добавит веса подвеске и снизит надежность её.
Нифига
Рычаги подвески + колесо и так имеют ширину с полметра примерно. То есть узлы их крепления к корпусу располагаются на метр - 80 см друг от друга. Ну, опять же, судя по моему Т4 Задняя чуть посложнее - там аммортизатор на корпус опирается. Ну да не суть важно.Причем короче ты их не сделаешь, потому что тогда вертикальный ход подвески будет меньше - а при посадке это важно. Говорю же - в качестве прототипа и источника запчастей - багги - самое то
И прочие жужики.Bredonosec> менее надежно, нежели простое складывание
Просто потому, что локальное давление в разных точках дается. Конструкция будет получать деформации, невидимые до поломки. Не, ну местное усиление, ессно, никто не отменял. Но складывание все-таки больно уж неудобно получается - балка длинная.
Bredonosec> а от гранат не откажешься, или же ни о какой пружинной подвеске, ни о каких поворотных колесах речи нет )
Ну, передние колеса неприводные. А взлет по любому производится на тяге винтов, а не колес - то есть муфта перещелкивается ДО взлета и ПОСЛЕ посадки.
Убей в себе зомби!
Придумал, как сделать заметно более компактный вариатор. Два конуса - лишние, ремень тоже... остается только сепаратор с роликами. Причем, частью можно совместить девайс с ШРУСами и муфтами на воздушные винты. И дифференциал не нать.
Убей в себе зомби!
 Bredonosec
Bredonosec
hcube> А в 'телеге' мотодельта - пилот выдвинут вперед. С точки зрения аэродинамики - более узкий фюзеляж предпочтительнее.
а с точки зрения центровок - лучше не кидать нагрузки по разным концам
В мотодельте-то впереди пилот будет всегда, так? То есть, жта часть развесовки константа.
А у тебя рядом может быть пассажир. То есть, достаточно далеко от цт - уже резкие вариации массы. Непорядок. Потому на всех 4-местных самолетиках паксосалон под крылом, чем поближе к цт.
hcube> То есть по сути, вопрос только в том, можно ли втиснуть дверь И хорду крыла между передним и задним колесами, если грубо формулировать.
угу. с уточнением, что оно должно быть удобно и технологично (подьемная передняя часть кузова не очень технологична)
hcube> Считаем Типовая длина автомобиля - от 3.5 до 5 метров.
неверно ))
Не с этого начинать надо, а с расстановки масс.
Длина авто нас не колышет, нас колышет только то, чтоб вариации масс не меняли центровки в пределах больше 0,18-0,35 САХ.
То есть, как бы ты ни нагружал аппарат - хоть один пилот, хоть все 4 человека и багаж, центровка не должна гулять больше. При хорде (САХ) крыла в 1 метр это гуляние у тебя получится порядка 17-18 см гуляния ЦМ. Вот и прикинь, какая должна быть масса машины, чтоб лишние 180 кг в метре с лишним от ЦМ не меняли центровку больше. Или насколько близко надо располагать к ЦМ полезную нагрузку. Или расширять хорду, чтоб расширить диапазон гуляния.
hcube> А никто и не спорит. Центровку надо делать правильно, для этого - пилота двигать по максимуму назад... или лучше - сделать ему передвижное сиденье с отметками '70кг', '80кг', '100кг', чтобы самобалансировался изменением плеча.
А теперь вспомни, что у него в руках штурвал, ноги на педалях, а глаза должны видеть обозначения на приборке, и под определенным углом иметь обзор на землю за капот. Угол менять нельзя, поскольку лётный навык на ВС привязывает взгляд к местным кабинным ориентирам. Напр, высота выравнивания- "когда вон та заклепка на капоте на край полосы ложиться будет", а летим в горизонте - когда линия горизонта на 5 см выше нижнего края стекла. (ну, к примеру)
Ну и какого размера будет салон - сколько лишнего обьёма таскать в небо...
hcube> Ну да, где-то так. В авиамодельных используется
я знаю, как в модельных ) Там нагрузки околонулевые )
А я говорю про авиационные )
hcube> Но если уж привод разрабатывать с нуля... я бы делал так - БК двигатель, на оси - одноступенчатый волновой редкутор. И дальше - электромагнитная муфта с двумя устойчивыми состояниями.
хм.. волновой редуктор? а это надежно? Почему не пользуют тогда?
Про муфту - это еще один девайс, который может сломаться. Да и на машинке такой массы многократное дублирование приводов - как-то, имхо, лишнее.
вполне достаточно классических тросов. А АП встроить в линию можно - на тросе "дорожка" зубчатая налеплена, по ней шестеренка привода крутится, подсоединенная через обычную муфту трения. Чтоб и пилот мог пересилить АП, а не рваться его выключать, и в случае заклинивания движок не сжечь.
Всё просто, дубово, дешево, надежно, легко чинится, легко заменяется, штурвал также шатается, давая пилоту информацию о том, что АП не сдох, а управляет машинкой.
hcube> Вес - нет. Не те масштабы.
каждый привод будет по паре кг весить. Местные усиления на крыле к нему тож не невесомы. по 3 привода на закрылок, элерон, рв, рн - 25кг железа только приводов. Зачем? Это ж не бтр ))
Тем более, что для РВ, РН на мелких вообще есть место только для одного привода )
>Надежность - тоже нет, даже если привод остается заклиненным, то это можно компенсировать работой соседних приводов.
друг друга пересиливать? И заклиненное ломать? Тут уже по принципу "сила есть ума не надо" гидравлику ставить надо ))) В пень, ну совершенно лишняя идея )
hcube> Я имел в виду, что самолет в отличии от мотодельта или автожира, нельзя 'свалить' в штопор, если он статически устойчив. Ну, по крайней мере, весьма сложно - после импульсных возмущений он сам обратно выравнивается, для этого не надо активно работать рулями.
эээ... как нельзя? ))
Есть машины, которые сложно свалить ))
Но сваливаются все.
А особенно легко -при предельно задней центровке. Вот тогда с ГО поток срывается, машинка в плоском штопоре как осенний лист крутится, вывести практически нереально (разве что, если тяга мотора дикая и можно дать обдув плоскостям, чтоб хвост поднять было чем)
hcube> Но летит, заметь!
кааак тебе сказать ))))
ухнуть легче легкого. Поставит тебя раком, не выправишь - поток сорвется, и штопори.
hcube> Почему в 3? В два. Сверху вниз, поттом снизу вверх, концы крыльев над крышей немного торчат.
максимум полтора метра вниз (по нормальному, считая запас на подвеску, на высоту крыла, на то, что нам не нужно делать автобус - менее метра), и столько же вверх. В итоге - размах одонго крыла - порядка 3 метров. При хорде крыла в 1 метр - 6 кв. метров площади крыла. При максимальном качестве Су порядка полутора, взлетная скорость на машинку в тонну весом - 150-160 кмч. Против 40-50 у нормальных машин.
Ну и как ты лететь будешь - тоже сомнения появляются.. Потому что считая тяговооруженность порядка 0,3 на близкой массе тебе нужно 170 лошадей (не считая потерь на кпд ВМГ и передачу момента), а максимальная скорость с такой тягой будет порядка 300кмч при самой идеальной аэродинамике, чего у тебя нет. Словом, минимальная скорость будет приближаться к максимальной, машина будет совсем не летучая.
>На четырехместной машинке можно еще концевые части крыла сложить поверх крыши, это даст еще с метр размаха. У корня - 20 см, в точке шарнира - 15, на конце - 10-7.
подумал, что изготовление крыла переменного профиля - это весьма сложно? Для массового производства можно матрицы наделать и по ним выклейки штамповать, а для штучного производства.. дешевле тебе обойдется бизджет купить =)
>Плюс еще 5 см на раму подкоса, которая складывается между крылом и корпусом.
подкос? уууу.... вообще несерьезно.. Это конструктор будет, а не машина.
>Движки (а точнее, выступы крыла с концевой частью ременной петли) - уходят в выборку в корпусе на уровне сидения, лопасти винта - туда же.
за счет салона? А сидеть где? У самолетов нет лишних обьёмов. Или за счет расширения фюзеляжа? Опять вопрос, как всё тянуть сквозь воздух.. А еще и обтекание этих выборок в полете....
>Ну, я готов согласиться на 35см... ну, на 40. Но не больше.
больше, увы.
И это без подкосов.
Вот, отталкивайся от примерных размерностей Cessna 172 — Википедия
- размах 11, площадь крыла 16, длина 8, двигло 160 лошадей.
И это без складываний и прочего.
Пусть машина старая, и за счет композитов можно облегчить, но у тебя только агрегатов добавляется на пару сотен кг, так что, будет тяжелее точно.
hcube> получаем 1.05 - для посадки одного ряда пассажиров вполне достаточно.
а для 2-местного тандемом.. имхо, как-то и не автомобиль получается... Я только на 4 места и ориентируюсь..
Bredonosec>> То, что у тебя колеса будут расставлены шире,- не сократит ширину авто. Только добавит веса подвеске и снизит надежность её.
hcube> Нифига Рычаги подвески + колесо и так имеют ширину с полметра примерно.
hcube> Причем короче ты их не сделаешь,
мы о разных вещах говорим ))
К чему ты тяги подвески прилепишь - дело твоё Я о том, что выдвижение колес в стороны тебе корпус не сузит никак
А про рост веса - ну, тяги понятно, а стояки, амортизаторы - во что упираются? Вот именно, в выколотки корпуса. Хочешь выносить в стороны - выноси на тягах и упорах. Чем они длиннее - тем больше плечо, тем мощнее они сами должны быть при равной выдерживаемой силе, и тем более крепки места крепления их на корпусе.
А это вес.
То есть, вынос колес в стороны - идея лишняя. У тебя и так одна подвеска будет весит не одну сотню кг. А тебе ведь еще с ней взлетать надо.
Ну, вынос не более чем тебе будет необходимо для устойчивости на посадке (не слишком узкая колея, чтоб крылом не чиркнуть)
hcube> Не, ну местное усиление, ессно, никто не отменял. Но складывание все-таки больно уж неудобно получается - балка длинная.
вдвижение еще хуже. И совсем неаэродинамичные прямоугольные вставки на длину вдвижения, и усиления-рельсы, и усложнения с органами управления.. нафиг0нафиг.
hcube> Ну, передние колеса неприводные. А взлет по любому производится на тяге винтов, а не колес - то есть муфта перещелкивается ДО взлета и ПОСЛЕ посадки.
А по дорогам на какой тяге ехать? Всё равно шрусы нужны.. Хотя б для подвески.. Ну, или пользуй карданы, хоть не знаю, чем они лучше )) имхо, хуже только )
>Придумал, как сделать заметно более компактный вариатор. Два конуса - лишние, ремень тоже... остается только сепаратор с роликами. Причем, частью можно совместить девайс с ШРУСами и муфтами на воздушные винты. И дифференциал не нать.
не понял. А что там работать-то будет, если только "сепаратор с роликами" оставить?
а с точки зрения центровок - лучше не кидать нагрузки по разным концам
В мотодельте-то впереди пилот будет всегда, так? То есть, жта часть развесовки константа.
А у тебя рядом может быть пассажир. То есть, достаточно далеко от цт - уже резкие вариации массы. Непорядок. Потому на всех 4-местных самолетиках паксосалон под крылом, чем поближе к цт.
hcube> То есть по сути, вопрос только в том, можно ли втиснуть дверь И хорду крыла между передним и задним колесами, если грубо формулировать.
угу. с уточнением, что оно должно быть удобно и технологично (подьемная передняя часть кузова не очень технологична)
hcube> Считаем
Типовая длина автомобиля - от 3.5 до 5 метров. неверно ))
Не с этого начинать надо, а с расстановки масс.
Длина авто нас не колышет, нас колышет только то, чтоб вариации масс не меняли центровки в пределах больше 0,18-0,35 САХ.
То есть, как бы ты ни нагружал аппарат - хоть один пилот, хоть все 4 человека и багаж, центровка не должна гулять больше. При хорде (САХ) крыла в 1 метр это гуляние у тебя получится порядка 17-18 см гуляния ЦМ. Вот и прикинь, какая должна быть масса машины, чтоб лишние 180 кг в метре с лишним от ЦМ не меняли центровку больше. Или насколько близко надо располагать к ЦМ полезную нагрузку. Или расширять хорду, чтоб расширить диапазон гуляния.
hcube> А никто и не спорит. Центровку надо делать правильно, для этого - пилота двигать по максимуму назад... или лучше - сделать ему передвижное сиденье с отметками '70кг', '80кг', '100кг', чтобы самобалансировался изменением плеча.
А теперь вспомни, что у него в руках штурвал, ноги на педалях, а глаза должны видеть обозначения на приборке, и под определенным углом иметь обзор на землю за капот. Угол менять нельзя, поскольку лётный навык на ВС привязывает взгляд к местным кабинным ориентирам. Напр, высота выравнивания- "когда вон та заклепка на капоте на край полосы ложиться будет", а летим в горизонте - когда линия горизонта на 5 см выше нижнего края стекла. (ну, к примеру)
Ну и какого размера будет салон - сколько лишнего обьёма таскать в небо...
hcube> Ну да, где-то так. В авиамодельных используется
я знаю, как в модельных ) Там нагрузки околонулевые )
А я говорю про авиационные )
hcube> Но если уж привод разрабатывать с нуля... я бы делал так - БК двигатель, на оси - одноступенчатый волновой редкутор. И дальше - электромагнитная муфта с двумя устойчивыми состояниями.
хм.. волновой редуктор? а это надежно? Почему не пользуют тогда?
Про муфту - это еще один девайс, который может сломаться. Да и на машинке такой массы многократное дублирование приводов - как-то, имхо, лишнее.
вполне достаточно классических тросов. А АП встроить в линию можно - на тросе "дорожка" зубчатая налеплена, по ней шестеренка привода крутится, подсоединенная через обычную муфту трения. Чтоб и пилот мог пересилить АП, а не рваться его выключать, и в случае заклинивания движок не сжечь.
Всё просто, дубово, дешево, надежно, легко чинится, легко заменяется, штурвал также шатается, давая пилоту информацию о том, что АП не сдох, а управляет машинкой.
hcube> Вес - нет. Не те масштабы.
каждый привод будет по паре кг весить. Местные усиления на крыле к нему тож не невесомы. по 3 привода на закрылок, элерон, рв, рн - 25кг железа только приводов. Зачем? Это ж не бтр ))
Тем более, что для РВ, РН на мелких вообще есть место только для одного привода )
>Надежность - тоже нет, даже если привод остается заклиненным, то это можно компенсировать работой соседних приводов.
друг друга пересиливать? И заклиненное ломать? Тут уже по принципу "сила есть ума не надо" гидравлику ставить надо ))) В пень, ну совершенно лишняя идея )
hcube> Я имел в виду, что самолет в отличии от мотодельта или автожира, нельзя 'свалить' в штопор, если он статически устойчив. Ну, по крайней мере, весьма сложно - после импульсных возмущений он сам обратно выравнивается, для этого не надо активно работать рулями.
эээ... как нельзя? ))
Есть машины, которые сложно свалить ))
Но сваливаются все.
А особенно легко -при предельно задней центровке. Вот тогда с ГО поток срывается, машинка в плоском штопоре как осенний лист крутится, вывести практически нереально (разве что, если тяга мотора дикая и можно дать обдув плоскостям, чтоб хвост поднять было чем)
hcube> Но летит, заметь!
кааак тебе сказать ))))
ухнуть легче легкого. Поставит тебя раком, не выправишь - поток сорвется, и штопори.
hcube> Почему в 3? В два. Сверху вниз, поттом снизу вверх, концы крыльев над крышей немного торчат.
максимум полтора метра вниз (по нормальному, считая запас на подвеску, на высоту крыла, на то, что нам не нужно делать автобус - менее метра), и столько же вверх. В итоге - размах одонго крыла - порядка 3 метров. При хорде крыла в 1 метр - 6 кв. метров площади крыла. При максимальном качестве Су порядка полутора, взлетная скорость на машинку в тонну весом - 150-160 кмч. Против 40-50 у нормальных машин.
Ну и как ты лететь будешь - тоже сомнения появляются.. Потому что считая тяговооруженность порядка 0,3 на близкой массе тебе нужно 170 лошадей (не считая потерь на кпд ВМГ и передачу момента), а максимальная скорость с такой тягой будет порядка 300кмч при самой идеальной аэродинамике, чего у тебя нет. Словом, минимальная скорость будет приближаться к максимальной, машина будет совсем не летучая.
>На четырехместной машинке можно еще концевые части крыла сложить поверх крыши, это даст еще с метр размаха. У корня - 20 см, в точке шарнира - 15, на конце - 10-7.
подумал, что изготовление крыла переменного профиля - это весьма сложно? Для массового производства можно матрицы наделать и по ним выклейки штамповать, а для штучного производства.. дешевле тебе обойдется бизджет купить =)
>Плюс еще 5 см на раму подкоса, которая складывается между крылом и корпусом.
подкос? уууу.... вообще несерьезно.. Это конструктор будет, а не машина.
>Движки (а точнее, выступы крыла с концевой частью ременной петли) - уходят в выборку в корпусе на уровне сидения, лопасти винта - туда же.
за счет салона? А сидеть где? У самолетов нет лишних обьёмов. Или за счет расширения фюзеляжа? Опять вопрос, как всё тянуть сквозь воздух.. А еще и обтекание этих выборок в полете....
>Ну, я готов согласиться на 35см... ну, на 40. Но не больше.
больше, увы.
И это без подкосов.
Вот, отталкивайся от примерных размерностей Cessna 172 — Википедия
- размах 11, площадь крыла 16, длина 8, двигло 160 лошадей.
И это без складываний и прочего.
Пусть машина старая, и за счет композитов можно облегчить, но у тебя только агрегатов добавляется на пару сотен кг, так что, будет тяжелее точно.
hcube> получаем 1.05 - для посадки одного ряда пассажиров вполне достаточно.
а для 2-местного тандемом.. имхо, как-то и не автомобиль получается... Я только на 4 места и ориентируюсь..
Bredonosec>> То, что у тебя колеса будут расставлены шире,- не сократит ширину авто. Только добавит веса подвеске и снизит надежность её.
hcube> Нифига
Рычаги подвески + колесо и так имеют ширину с полметра примерно. hcube> Причем короче ты их не сделаешь,
мы о разных вещах говорим ))
К чему ты тяги подвески прилепишь - дело твоё
Я о том, что выдвижение колес в стороны тебе корпус не сузит никак А про рост веса - ну, тяги понятно, а стояки, амортизаторы - во что упираются? Вот именно, в выколотки корпуса. Хочешь выносить в стороны - выноси на тягах и упорах. Чем они длиннее - тем больше плечо, тем мощнее они сами должны быть при равной выдерживаемой силе, и тем более крепки места крепления их на корпусе.
А это вес.
То есть, вынос колес в стороны - идея лишняя. У тебя и так одна подвеска будет весит не одну сотню кг. А тебе ведь еще с ней взлетать надо.
Ну, вынос не более чем тебе будет необходимо для устойчивости на посадке (не слишком узкая колея, чтоб крылом не чиркнуть)
hcube> Не, ну местное усиление, ессно, никто не отменял. Но складывание все-таки больно уж неудобно получается - балка длинная.
вдвижение еще хуже. И совсем неаэродинамичные прямоугольные вставки на длину вдвижения, и усиления-рельсы, и усложнения с органами управления.. нафиг0нафиг.
hcube> Ну, передние колеса неприводные. А взлет по любому производится на тяге винтов, а не колес - то есть муфта перещелкивается ДО взлета и ПОСЛЕ посадки.
А по дорогам на какой тяге ехать? Всё равно шрусы нужны.. Хотя б для подвески.. Ну, или пользуй карданы, хоть не знаю, чем они лучше )) имхо, хуже только )
>Придумал, как сделать заметно более компактный вариатор. Два конуса - лишние, ремень тоже... остается только сепаратор с роликами. Причем, частью можно совместить девайс с ШРУСами и муфтами на воздушные винты. И дифференциал не нать.
не понял. А что там работать-то будет, если только "сепаратор с роликами" оставить?
Bredonosec> А у тебя рядом может быть пассажир. То есть, достаточно далеко от цт - уже резкие
Не рядом. Пассажир сидит последовательно, так же как на мотодельте. Рядом он может быть только в четырехместном варианте.
> друг друга пересиливать? И заклиненное ломать?
Зачем?! Просто секционировать элерон, и все. Один кусок - один привод.
> У тебя и так одна подвеска будет весит не одну сотню кг. А тебе ведь еще с ней взлетать надо.
Ну осетра-то урежь - целиковый багги весит 400 кг - это с двигателем, мощной стальной рамой и двумя паксами. То есть по 100 кг на подвеску вместе с колесами - более чем. Тут же все-таки не грузовик, тут полная масса - те же 400-500 кг.
> не понял. А что там работать-то будет, если только "сепаратор с роликами" оставить?
А сепаратор и будет. Получится планетарка. Сепаратор неподвижен, внутренний конус крутится в одну сторону, внешний - в другую. Пачка подшипников на сепараторе - движется вдоль образующей конуса и меняет соотношение. Если размер подшипника сопоставим с размером конуса - получается где-то 3-4 раза соотношение. Во внутренний конус монож сразу еще и ШРУС заделать, а то еще и муфту-стакан для зацепления со ШРУСом или внешним стаканом в зависимости от положения.
Не рядом. Пассажир сидит последовательно, так же как на мотодельте. Рядом он может быть только в четырехместном варианте.
> друг друга пересиливать? И заклиненное ломать?
Зачем?! Просто секционировать элерон, и все. Один кусок - один привод.
> У тебя и так одна подвеска будет весит не одну сотню кг. А тебе ведь еще с ней взлетать надо.
Ну осетра-то урежь - целиковый багги весит 400 кг - это с двигателем, мощной стальной рамой и двумя паксами. То есть по 100 кг на подвеску вместе с колесами - более чем. Тут же все-таки не грузовик, тут полная масса - те же 400-500 кг.
> не понял. А что там работать-то будет, если только "сепаратор с роликами" оставить?
А сепаратор и будет. Получится планетарка. Сепаратор неподвижен, внутренний конус крутится в одну сторону, внешний - в другую. Пачка подшипников на сепараторе - движется вдоль образующей конуса и меняет соотношение. Если размер подшипника сопоставим с размером конуса - получается где-то 3-4 раза соотношение. Во внутренний конус монож сразу еще и ШРУС заделать, а то еще и муфту-стакан для зацепления со ШРУСом или внешним стаканом в зависимости от положения.
Убей в себе зомби!
Это сообщение редактировалось 14.09.2011 в 00:30
hcube> Не рядом. Пассажир сидит последовательно, так же как на мотодельте. Рядом он может быть только в четырехместном варианте.
дык говорил, не воспринимаю "автомобиль" за "мотоцикл"..
hcube> Зачем?! Просто секционировать элерон, и все. Один кусок - один привод.
аа.. можно.. но больше узлов подвески (по 2 на каждую секцию вместо всего 2), - больше веса, больше сложность..
hcube> Ну осетра-то урежь - целиковый багги весит 400 кг - это с двигателем, мощной стальной рамой и двумя паксами. То есть по 100 кг на подвеску вместе с колесами - более чем. Тут же все-таки не грузовик, тут полная масса - те же 400-500 кг.
так у багги-то рама пространственная. Наиболее удобно расположенная, чтоб нагрузки ловить.
а на самолете - аэродинамика иное требует. Там уже надо невыгодно располагать. Или летать бум как топорик. Вот и рост веса.
hcube> А сепаратор и будет.
честно говоря, не понял ((( нарисуй, если не в сложность.. Бо не понимаю, как ты одно с другим совмещаешь (( У меня получаются в голове толкьо совершенно нежизнеспособные образы - наверно я чего-то недопонимаю..
зы, вариант похожий на твой встретил:
дык говорил, не воспринимаю "автомобиль" за "мотоцикл"..
hcube> Зачем?! Просто секционировать элерон, и все. Один кусок - один привод.
аа.. можно.. но больше узлов подвески (по 2 на каждую секцию вместо всего 2), - больше веса, больше сложность..
hcube> Ну осетра-то урежь - целиковый багги весит 400 кг - это с двигателем, мощной стальной рамой и двумя паксами. То есть по 100 кг на подвеску вместе с колесами - более чем. Тут же все-таки не грузовик, тут полная масса - те же 400-500 кг.
так у багги-то рама пространственная. Наиболее удобно расположенная, чтоб нагрузки ловить.
а на самолете - аэродинамика иное требует. Там уже надо невыгодно располагать. Или летать бум как топорик. Вот и рост веса.
hcube> А сепаратор и будет.
честно говоря, не понял ((( нарисуй, если не в сложность.. Бо не понимаю, как ты одно с другим совмещаешь (( У меня получаются в голове толкьо совершенно нежизнеспособные образы - наверно я чего-то недопонимаю..
зы, вариант похожий на твой встретил:


Bredonosec> дык говорил, не воспринимаю "автомобиль" за "мотоцикл"..
Ну, версия поуже - мотоцикл, пошире - автомобиль, еще больше и шире - микроавтобус.
Bredonosec> так у багги-то рама пространственная. Наиболее удобно расположенная, чтоб нагрузки ловить.
Так и тут пространственная - дуга от крыла до переднего и заднего шасси, и распоры, плюс рама в основании.
Bredonosec> а на самолете - аэродинамика иное требует. Там уже надо невыгодно располагать. Или летать бум как топорик. Вот и рост веса.
Выгодно, если вписать раму с установленными на нее панелями в аэродинамику.
Bredonosec> честно говоря, не понял ((( нарисуй, если не в сложность.. Бо не понимаю, как ты одно с другим совмещаешь (( У меня получаются в голове толкьо совершенно нежизнеспособные образы - наверно я чего-то недопонимаю..
Покрутил в голове... в общем, идеологически где-то так - две вогнутые полусферы, между ними качается колесо. Точки контакта колеса с полусферами описывают две окружности в зависимости от угла наклона, наклон уменьшает радиус на одной сфере и одновременно увеличивает на другой. Лишний/недостающий момент берется с оси качания колеса... ну, это надо еще подумать в общем.
upd : все так, только не сферы, а тороидальные поверхности с малым (может даже отрицательным) внутренним радиусом. А дальше - как в планетарном редукторе. Причем поскольку ведущие колесики так и так будут изнашиваться, можно совместить редуктор и фрикцион.
Bredonosec> зы, вариант похожий на твой встретил:
Bredonosec> http://cs136.vkontakte.ru/u4529174/1563184/x_49e7e619.jpg
Да, весьма похоже. Только у меня крыло верхнего размещения, и соответственно складывается вниз, и хвостовое оперение также убирается ближе к корпусу. То есть при меньшем габарите в сложенном состоянии, аэродинамическая база у меня больше.
Ну, версия поуже - мотоцикл, пошире - автомобиль, еще больше и шире - микроавтобус.
Bredonosec> так у багги-то рама пространственная. Наиболее удобно расположенная, чтоб нагрузки ловить.
Так и тут пространственная - дуга от крыла до переднего и заднего шасси, и распоры, плюс рама в основании.
Bredonosec> а на самолете - аэродинамика иное требует. Там уже надо невыгодно располагать. Или летать бум как топорик. Вот и рост веса.
Выгодно, если вписать раму с установленными на нее панелями в аэродинамику.
Bredonosec> честно говоря, не понял ((( нарисуй, если не в сложность.. Бо не понимаю, как ты одно с другим совмещаешь (( У меня получаются в голове толкьо совершенно нежизнеспособные образы - наверно я чего-то недопонимаю..
Покрутил в голове... в общем, идеологически где-то так - две вогнутые полусферы, между ними качается колесо. Точки контакта колеса с полусферами описывают две окружности в зависимости от угла наклона, наклон уменьшает радиус на одной сфере и одновременно увеличивает на другой. Лишний/недостающий момент берется с оси качания колеса... ну, это надо еще подумать в общем.
upd : все так, только не сферы, а тороидальные поверхности с малым (может даже отрицательным) внутренним радиусом. А дальше - как в планетарном редукторе. Причем поскольку ведущие колесики так и так будут изнашиваться, можно совместить редуктор и фрикцион.
Bredonosec> зы, вариант похожий на твой встретил:
Bredonosec> http://cs136.vkontakte.ru/u4529174/1563184/x_49e7e619.jpg
Да, весьма похоже. Только у меня крыло верхнего размещения, и соответственно складывается вниз, и хвостовое оперение также убирается ближе к корпусу. То есть при меньшем габарите в сложенном состоянии, аэродинамическая база у меня больше.
Убей в себе зомби!
Это сообщение редактировалось 24.09.2011 в 11:35
Copyright © Balancer 1997..2018
Создано 29.03.2006
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 29.03.2006
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}