-
/1247584-kt315-250-1.jpg)
Идеи для Arduino
Теги:
 Balancer
Balancer

Balancer> Что, если попробовать придумать датчик, который будет такое фиксировать и что-то предпринимать... Ну, например, освежителем из баллончика отпугивать ")
Сегодня руки дошли, наконец. Пока только с одним простеньким датчиком присутствия, если перед конструкцией появится препятствие (кошка) в пределах сантиметров 20..30, то брызгает
На базовый вариант ушло минут 20 возни и экспериментов. Интереса ради, записывал процесс на видео, потом, будет время, нарежу, сделаю небольшой урок по Ардуино, м.б. кому-то полезно будет.
Насколько эффективна будет конструкция — не знаю. Больно близко кошке подходить нужно. С другой стороны, девайс получается активный, м.б. бояться его станет самого по себе А то страшных девайсов, но без присутствия людей не боится. Хоть на пылесосе может спать, хоть об баллончик освежителя тереться. Пока в руки их не возьмёшь
Сегодня руки дошли, наконец. Пока только с одним простеньким датчиком присутствия, если перед конструкцией появится препятствие (кошка) в пределах сантиметров 20..30, то брызгает
На базовый вариант ушло минут 20 возни и экспериментов. Интереса ради, записывал процесс на видео, потом, будет время, нарежу, сделаю небольшой урок по Ардуино, м.б. кому-то полезно будет.
Насколько эффективна будет конструкция — не знаю. Больно близко кошке подходить нужно. С другой стороны, девайс получается активный, м.б. бояться его станет самого по себе
А то страшных девайсов, но без присутствия людей не боится. Хоть на пылесосе может спать, хоть об баллончик освежителя тереться. Пока в руки их не возьмёшь


 инфо
инфо инструменты
инструменты
Программка совсем примитивная, написалась и заработала с первого раза. Кстати, мой первый код на Processing.
Использовался вот такой датчик, E18-D50NK:
Это цифровой ключ на три ноги. Земля, питание, сигнал. Сигнал — цифровой, «0» при наличии препятствия.
Ну и, соответственно, уже упомянутый спрей AirWick Fresh Matic
У последнего, как я писал раньше, я спалил датчик нажатия, но и без него оказалось отлично. Просто врубаешь на 0.5 сек. моторчик и хватает. Даже назад потом откручивать не надо, хватает отталкивания головкой баллона. Сперва сделал вариант с откруткой, так он всё время вхолостую срабатывал, проскакивали шестерёнки, встав на упор. Так что программка совсем простая вышла.
Для управления двигателем — моторшилд на L298P
code c
- /**
- Управление разбрызгивателем.
- */
- #define PIN_SNS 7 // Входной пин сенсора присутствия
- #define PIN_DIR 12 // Направление вращения
- #define PIN_CTR 13 // Управление двигателем
- void setup() {
- pinMode(PIN_SNS, INPUT); // Контакт сенсора работает на вход
- pinMode(PIN_DIR, OUTPUT); // А эти два — на выход
- pinMode(PIN_CTR, OUTPUT);
- }
- void loop() {
- int state = !digitalRead(PIN_SNS); // Наш сенсор выдаст 0, если что-то обнаружит
- if(state)
- spray();
- delay(500); // Чтобы не работать непрерывно, небольшая задержка в цикле.
- }
- void spray() {
- start_motor(); // Включаем мотор на разбрызгивание
- delay(500); // ждём 0.5 сек
- stop_motor(); // Останавливаем мотор
- delay(5000); // Ждём 5 секунд и выходим
- }
- void start_motor() {
- digitalWrite(PIN_DIR, LOW); // Низкий уровень указывает на прямое вращение
- digitalWrite(PIN_CTR, HIGH); // Включаем мотор
- }
- void stop_motor() {
- digitalWrite(PIN_CTR, LOW); // Выключаем мотор
- }
Использовался вот такой датчик, E18-D50NK:

Это цифровой ключ на три ноги. Земля, питание, сигнал. Сигнал — цифровой, «0» при наличии препятствия.
Ну и, соответственно, уже упомянутый спрей AirWick Fresh Matic

У последнего, как я писал раньше, я спалил датчик нажатия, но и без него оказалось отлично. Просто врубаешь на 0.5 сек. моторчик и хватает. Даже назад потом откручивать не надо, хватает отталкивания головкой баллона. Сперва сделал вариант с откруткой, так он всё время вхолостую срабатывал, проскакивали шестерёнки, встав на упор. Так что программка совсем простая вышла.
Для управления двигателем — моторшилд на L298P

В процессе отладки комната страшно провоняла освежителем  Открытое настежь окно едва помогает
Открытое настежь окно едва помогает
Открытое настежь окно едва помогает

Floyd> А motorShield по SPI подключается ?
Не-не... Там просто (на каждый из двух каналов) два бинарных выхода: включение двигателя и направление вращения (EA/IA и EB/IB). Вешаем их на два цифровых выхода и вращаем как захотим. Это на конкретно этом шилде, т.к. есть ещё всякие хитрые, для управления шаговыми движками и т.п.
Не-не... Там просто (на каждый из двух каналов) два бинарных выхода: включение двигателя и направление вращения (EA/IA и EB/IB). Вешаем их на два цифровых выхода и вращаем как захотим. Это на конкретно этом шилде, т.к. есть ещё всякие хитрые, для управления шаговыми движками и т.п.
Balancer> С другой стороны, девайс получается активный, м.б. бояться его станет самого по себе
Тварь. Она запомнила максимальную дистанцию сенсора. И сходила за его пределами А увеличивать дистанцию нельзя, так как начнёт срабатывать на открывающуюся дверь. Поединок разумов продолжается...
Тварь. Она запомнила максимальную дистанцию сенсора. И сходила за его пределами
А увеличивать дистанцию нельзя, так как начнёт срабатывать на открывающуюся дверь. Поединок разумов продолжается...

Balancer> Поединок разумов продолжается...

Ставлю на "тварь". Она вас всех выдрессирует под свои вкусы, и технику тоже
Ставлю на "тварь". Она вас всех выдрессирует под свои вкусы, и технику тоже
В тот день, когда ты решишь, что ты лишен недостатков , попробуй прогуляться по воде


Balancer> А увеличивать дистанцию нельзя ...
А угол от оси сенсора до объекта получить можно?
А угол от оси сенсора до объекта получить можно?
... так пускай наступает на нас холодным рассветом новый день ...
AXT> А угол от оси сенсора до объекта получить можно?
Нет, он тупой. Светит (относительно узким лучом) ИК-светодиодом и ловит отражение на ИК-фотодиод.
Переставил ближе, теперь срабатывает при открытии двери настежь, будем считать, что это такая автоматизация В смысле — автоматическое освежение воздуха при выходе и выходе. Зато прошли сутки и в «охраняемой» стороне туалета — чисто Кошка, похоже, решила больше не экспериментировать.
...
Правда, собака, конструкция в целом жрёт много. 90 мА в режиме ожидания от 12В. Судя по ТТХ, это сенсор основной потребитель. Аккумулятор шустро выедается. А питание в туалет провести сложно, не электрифицирован. Надо, наверное, взять ещё небольшой свинцовый аккумулятор на 2..4Ач
Нет, он тупой. Светит (относительно узким лучом) ИК-светодиодом и ловит отражение на ИК-фотодиод.
Переставил ближе, теперь срабатывает при открытии двери настежь, будем считать, что это такая автоматизация
В смысле — автоматическое освежение воздуха при выходе и выходе. Зато прошли сутки и в «охраняемой» стороне туалета — чисто Кошка, похоже, решила больше не экспериментировать....
Правда, собака, конструкция в целом жрёт много. 90 мА в режиме ожидания от 12В. Судя по ТТХ, это сенсор основной потребитель. Аккумулятор шустро выедается. А питание в туалет провести сложно, не электрифицирован. Надо, наверное, взять ещё небольшой свинцовый аккумулятор на 2..4Ач
Оригинальный замок для двери на основе Arduino и ёмкостного датчика
Rob Hemsley из Массачусетского технологического института сделал оригинальный замок для двери на основе Arduino и ёмкостного датчика. Это второй вариант замка,...// habrahabr.ru



go6pbiu
новичок
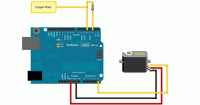
добрый человек, подскажи, пожалуйста, как правильно этот датчик подключать к ардуине (который жёлтенький) - я себе всю голову поломал, не работает он у меня и всё тут. Красный провод к плюсу сую, черный к минусу, а с желтого сигнал снимаю - если цифровой снимаю, то там всегда 1, если аналоговый, тоже 1020 - 1022. Что я не так делаю?


go6pbiu> Красный провод к плюсу сую, черный к минусу, а с желтого сигнал снимаю
Угу, именно так.
紅 — красный (по схеме — VCC, питание)
綠 — зелёный (у меня, по схеме — земля)
黃 — жёлтый (по схеме — сигнальный выход)
go6pbiu> если цифровой снимаю, то там всегда 1, если аналоговый, тоже 1020 - 1022. Что я не так делаю?
Вот это странно. Сигнал там цифровой, при срабатывании — ноль, при отсутствии контакта — единица (в аналоговом, соответственно, около 1000).
Попробуй на него через фотоаппарат цифровой посмотреть, там, вообще, ИК-светодиод светится? (ИК через цифровые аппараты выглядит фиолетовым). Может, сгорел? А винт регулировки чувствительности сзади крутил? У меня он мало на что влияет, но мало ли…
Угу, именно так.
紅 — красный (по схеме — VCC, питание)
綠 — зелёный (у меня, по схеме — земля)
黃 — жёлтый (по схеме — сигнальный выход)
go6pbiu> если цифровой снимаю, то там всегда 1, если аналоговый, тоже 1020 - 1022. Что я не так делаю?
Вот это странно. Сигнал там цифровой, при срабатывании — ноль, при отсутствии контакта — единица (в аналоговом, соответственно, около 1000).
Попробуй на него через фотоаппарат цифровой посмотреть, там, вообще, ИК-светодиод светится? (ИК через цифровые аппараты выглядит фиолетовым). Может, сгорел? А винт регулировки чувствительности сзади крутил? У меня он мало на что влияет, но мало ли…
- Последние действия над темой
- Balancer [19.06.2013 12:25]: Перенос в новую тему Arduino
- Balancer [19.06.2013 12:43]: Перенос сообщений в Arduino
- Все действия над темой
Copyright © Balancer 1997..2018
Создано 12.03.2012
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 12.03.2012
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}