-
![[image]](https://www.balancer.ru/cache/sites/am/do/do/weapon/weapon/128x128-crop/7.92.jpg)
Автоматика оружия на иных (немеханических) принципах
Управляемый затвор.Теги:
 Wyvern-2
Wyvern-2

Предлагаю джентльменам отвлечься от дел политический и немного подумать над ")
Идея мучает мну давно. Первые наброски были выложены мной на Ганзе, где получили немало критики, в т.ч. и дельной. Что и послужило толчком для дальнейшего развития, результат которого для обсуждения мной и предлагается. В путь!
Идея мучает мну давно. Первые наброски были выложены мной на Ганзе, где получили немало критики, в т.ч. и дельной. Что и послужило толчком для дальнейшего развития, результат которого для обсуждения мной и предлагается. В путь!


 инфо
инфо инструменты
инструменты
Памяти Михаила Тимофеевича Калашникова посвящается.
Автор не собирается патентовать данную идею, но будет судебно преследовать всех, кто попытается это сделать (Н.Г.Зубков, 17.09.2012 )
Известен, т.н. свободный или инерционный затвор - продольно-скользящий затвор, не сцепленный с неподвижным стволом во время выстрела.
Отдача свободного затвора - принцип действия автоматики перезаряжания огнестрельного оружия, при котором продольно-скользящий затвор не сцеплен с неподвижным стволом, а его отход назад при выстреле замедляется преимущественно большой массой самого затвора и некоторыми вспомогательными силами, как то: силой трения стенок гильзы о патронник, силой сопротивления возвратной пружины и силой трения между затвором и стенками затворной коробки или направляющими (последние две силы пренебрежимо малы)
Данный тип автоматики имеет следующие преимущества:
1. Свободный затвор конструктивно проще любого другого типа запирания ствола.
2. Свободный затвор испытывает только деформацию сжатия. Что позволяет успешно использовать для изготовления свободного затвора сравнительно малопрочные, но дешёвые и простые в обработке материалы
3. Свободный затвор позволяет сделать движение почти всех частей автоматики по линии ось ствола-центр тяжести затвора-точка упора в плечо стрелка, что обеспечивает высокую кучность автоматической стрельбы.
И недостатки, вернее, если быть точным, один недостаток:
Потребность в большой массе затвора. Так как замедление затвора в первом приближение обеспечивается только его инерционностью, то, что бы затвор не откатывался раньше необходимого момента времени на большее, чем требуется расстояние, требуется наращивать его массу. Меньшая потребной масса затвора, приводит к:
1. Раннему отпиранию затвора на расстояние большее (примерно 1,5-2,5 мм) чем длинна утолщенной донной части гильзы, что приводит в конечном итоге к ее поперечному разрыву под давлением пороховых газов.
2. Чрезмерно высокому, неконтролируемому темпу стрельбы в очереди.
При этом, достаточная для обеспечения работы автоматики масса затвора не только увеличивает общую массу оружия, но и приводит к увеличению колебаний оружия при стрельбе очередями за счет быстрого возвратно-поступательного движения массивного затвора и (особенно) его ударов в крайних положениях.
Известны многочисленные попытки решить данную конструктивную проблему:
1. Снизить потребную массу свободного затвора за счет увеличения трения между стенкой гильзы и патронника. Из простейшего расчета видно, что если трение стенок (длина) гильзы превосходит некоторую предельную величину, система работать не будет, так как гильза при выстреле останется в патроннике и скорее всего получит поперечный разрыв, что приведёт к заклиниванию оружия и может стать причиной травмы стрелка. Особенно велик риск такого развития события при использовании гильз с высоким коэффициентом бутылочности из-за того, что пороховые газы давят как на донце такой гильзы, так и на её скат изнутри.
2. Применением механических систем, замедляющий перемещение затвора, т.е. применение т.н. полусвободного затвора. Это позволяет решить большую часть проблем, но лишает схему главного преимущества - конструктивной и физической простоты, делая такие системы не менее сложными, чем более надежные системы, например, с газовым двигателем.
3. Применение гидравлических или пневматических систем поглощения энергии. Эти системы имеют низкую надежность при высокой сложности изготовления.
Предлагается конструктивное решение проблемы за счет введения дополнительной немеханической силы замедляющей движение свободного затвора, причем обеспечивающей не только замедление перемещения, но и вообще контроль и управление этим движением.
Наиболее эффективными для выработки движущих сил (моментов) оказываются устройства, основанные на преобразовании электрической энергии в механическую.
Хорошо известны их преимущества: легкость преобразования параметров и передачи энергии, возможность максимального приближения электромеханического преобразователя к рабочему механизму, гибкость управления процессами преобразования.
При этом наилучшая гибкость управления механическим движением достигается за счет использования вентильного безколлекторного управляемой микроконтроллером по обратной связи электромеханического преобразователя и исключения из состава электропривода механических элементов. Такой электропривод обычно называется безредукторным, или прямым, электроприводом с вентильным двигателем.
Конструкторская задача фактически в этом случае распадается на две части:
1. Обеспечить запирание затвора в период нарастания давления в стволе до максимального и далее, до его спадения до оптимального.
2. Обеспечить замедление-контролирование перемещения затвора после его отпирания.
Для решения первой задачи электромеханическое преобразование малопригодно из-за того, что перемещение при этом минимально - менее 2 мм, а усилия необходимые для удержания затвора — максимальны. Анализ существующих - и охватывающих практически все поле задачи — решений показывает, что оптимальным является схема запирания затвора давлением пороховых газов при минимальном (околонулевом) перемещении газового поршня — т. н. схема немецкого инженера Курта Хорна. Эта схема требует минимального количества элементов, собственно только миниатюрного газового поршня, его возвратной пружины и отверстия в стволе вблизи патронника, отличается технологичностью изготовления, практической нечувствительностью к загрязнению, ввиду очень малого перемещения поршня и очень высокой надежностью: в свое время советскими специалистами было произведено 1900 выстрелов из трофейного автомата Хорна во всех мыслимых вариантах - смазанном и промытом от смазки, при -60Сº и +50Сº, из чистого и специального запыленного насухо и поверх смазки — ноль (!) отказов по вине автоматики.
Решение второй задачи на основе электромеханического преобразования так же имеет ряд решений, из которых оптимальными, на взгляд автора, являются два:
А. Торможение затвора вихретоковым тормозом.
Б. Торможение и контроль перемещения затвора прямым линейным обратимым электромеханическим преобразователем с микроконтроллерным управлением по обратной связи.
Первое решение обладает простотой конструкции и очень высокой надежностью - такие тормоза традиционно применяются там, где необходима высокая гарантия срабатывания системы торможения, свойством автобалансирования, так как вихретоковый тормоз тем эффективней, чем выше скорость движения тормозимого элемента. Но это решение не позволяет осуществлять контроль перемещения затвора, поэтому в данном случае рассматриваться не будет.
Формула:
АВТОМАТИКА ОРУЖИЯ НА ОСНОВЕ МЕХАНИЧЕСКИ ПОЛУСВОБОДНОГО ЗАТВОРА, ЗАПИРАЕМОГО ГАЗОВЫМ ПОРШНЕМ, ПЕРЕМЕЩЕНИЕ КОТОРОГО УПРАВЛЯЕТСЯ ПРЯМЫМ ЛИНЕЙНЫМ ОБРАТИМЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ.
Особенности конструкции:
1. Все элементы прямого электромеханического преобразователя (ЭМП), включая схему управления, коммутатор-инвертор, устройство накопления электроэнергии встроены непосредственно в затвор, исключая только зубчатый статор, расположенный на ствольной коробке или любой другой неподвижной части конструкции оружия.
2. Система электромеханического преобразователя является замкнутой по энергии, не требующей внешних источников питания.
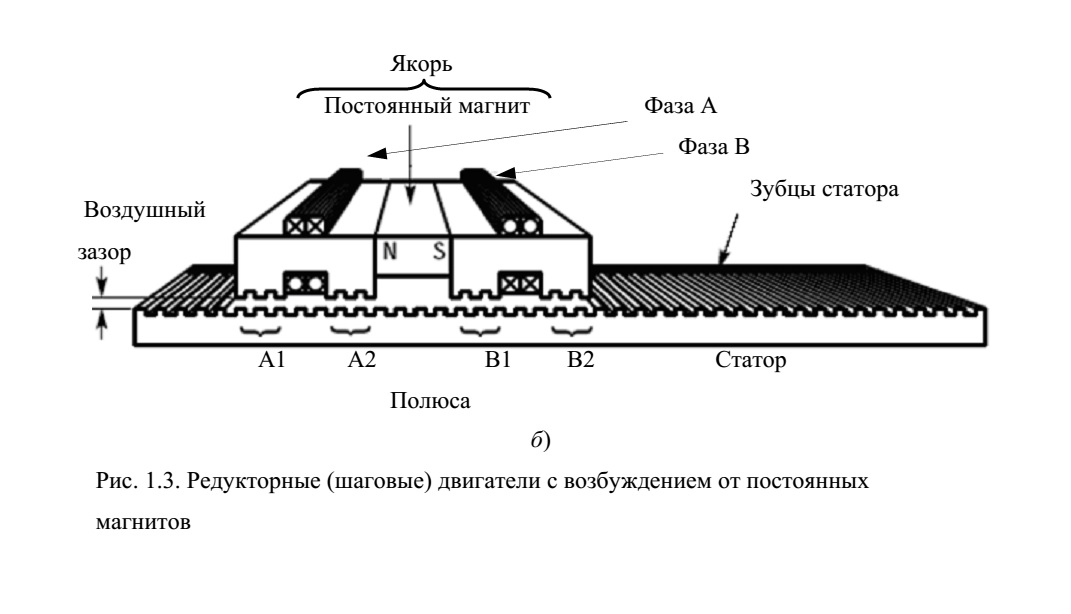
3. Наиболее подходящей конкретной системой ЭМП представляется линейная синхронная машина с сосредоточенными обмотками и зубчатыми полюсами с возбуждением от постоянных магнитов с микроконтроллерным управлением по бездатчиковой, основанной на анализе поведения электромагнитных переменных в основной электроцепи, схеме.
4. В качестве возбуждающих постоянных магнитов наиболее эффективным представляется применение высококоэрцитивных редкоземельных магнитов, в качестве накопителей электроэнергии - конденсаторов, а в качестве элементов коммутатора - MOSFET или IGBT транзисторов.
5. В настоящее время стоимость электронных систем стала гораздо ниже высокоточных механических. То же относится и к остальным элементам системы. В то же время цена изготовления прецизионной механики, с высокими требованиями к чистоте поверхности и точности геометрических размеров дорожает с каждым годом. Например, для обеспечения работы линейного ЭМП при практической неизменности характеристик зазор между статором и якорем может колебаться в пределах от 0,01 мм до 0,1 мм, в то время как части затвора/затворной рамы автомата Калашникова должны быть обработаны до 7-8 классов чистоты.
Рассмотрим вариант конкретной реализации подобного устройства.
В системе имеет механический свободный затвор с возвратной пружиной и УСМ курочного типа с боевой пружиной, запираемого двумя шепталами - одиночного огня с спуском от спускового крючка и автоматического огня с спуском при помощи соленоидной защелки. На чашечке затвора находится экстрактор для аварийного извлечения патрона/гильзы, в прорезь в теле затвора входит неподвижно закрепленный на направляющей ствольной коробки отражатель гильзы. Так же на ствольной коробке закреплен (или является ее конструктивной частью) зубчатый статор ЭМП. Вся конструкция ЭМП, а именно: управляющий микроконтроллер, электрическая схема с слаботочной и сильноточной частями, инвертор-коммутатор, токопроводящие шины, накопитель электроэнергии, катушки и магниты ротора непосредственно встроены в затвор и являются его конструктивной частью. Так как вся электронная часть находится внутри металлического затвора и залита компаундом устройство полностью нечувствительно к внешнему ЭМИ и влаге.
При освобождении курка от удерживающего его шептала одиночного огня при нажатии на спусковой крючок, боек, от удара курка, накалывает капсюль, происходит выстрел. Пороховые газы оказывают давление одновременно на пулю, на газовый поршень и на донце гильзы. Нарастающее давление пороховых газов через газовый поршень удерживает затвор неподвижным. После падения давления до оптимального, происходит расцепление затвора и газового поршня и затвор начинает движение. При этом газовый поршень, в отличии от оригинальной схемы Хорна, больше не контактирует с затвором и не оказывает на него никакого влияния. После начала движения затвора в электроцепи появляется электроток, запитывающий микроконтроллер (МК), что является моментом начала отработки им программы управления. Контролируя параметры тока в цепи, МК тормозит через ЭМП, работающий в генераторном режиме, затвор. В конце движения затвора, непосредственно у крайнего заднего положения, возможно, потребуется работа ЭМП в качестве электродвигателя, создающего обратный направлению движения момент (активный электротормоз). Так как МК контролирует параметры выстрела на всем его протяжение за счет контроля тока в цепи, то возможен привод затвора к задней конечной точке с минимально возможной или вообще околонулевой скоростью. Извлечение гильзы происходит без участия закреплённого на затворе выбрасывателя - он лишь удерживает её в чашечке затвора. Гильза двигаясь назад, набегает на отражатель и выбрасывается вовне. При этом взводится боевая пружина, и курок становится на электромагнитное шептало автоматического огня. При движении затвора вперед, в зависимости от необходимых параметров движения, ЭМП может либо снова подтормаживать движение затвора, либо, например, для увеличения скорострельности, наоборот, разгонять затвор, опять так останавливая его для недопущения удара в крайнем переднем положении.
Кроме того, элекромеханический преобразователь, под управлением МК осуществляет так же функцию, важного для схемы Хорна, противоотскочного устройства — не допускает отскок затвора от крайне переднего положения, гарантируя зацепление газового поршня с затвором. После окончания цикла при положении затвора в крайнем переднем положении с зацеплением с газовым поршнем схема обесточивается и, соответственно, электромагнитное шептало автоматического огня освобождает курок. Если снято и шептало одиночного огня (положение «автоматический огонь») цикл повторяется.
. .
Автор не собирается патентовать данную идею, но будет судебно преследовать всех, кто попытается это сделать (Н.Г.Зубков, 17.09.2012 )
Известен, т.н. свободный или инерционный затвор - продольно-скользящий затвор, не сцепленный с неподвижным стволом во время выстрела.
Отдача свободного затвора - принцип действия автоматики перезаряжания огнестрельного оружия, при котором продольно-скользящий затвор не сцеплен с неподвижным стволом, а его отход назад при выстреле замедляется преимущественно большой массой самого затвора и некоторыми вспомогательными силами, как то: силой трения стенок гильзы о патронник, силой сопротивления возвратной пружины и силой трения между затвором и стенками затворной коробки или направляющими (последние две силы пренебрежимо малы)
Данный тип автоматики имеет следующие преимущества:
1. Свободный затвор конструктивно проще любого другого типа запирания ствола.
2. Свободный затвор испытывает только деформацию сжатия. Что позволяет успешно использовать для изготовления свободного затвора сравнительно малопрочные, но дешёвые и простые в обработке материалы
3. Свободный затвор позволяет сделать движение почти всех частей автоматики по линии ось ствола-центр тяжести затвора-точка упора в плечо стрелка, что обеспечивает высокую кучность автоматической стрельбы.
И недостатки, вернее, если быть точным, один недостаток:
Потребность в большой массе затвора. Так как замедление затвора в первом приближение обеспечивается только его инерционностью, то, что бы затвор не откатывался раньше необходимого момента времени на большее, чем требуется расстояние, требуется наращивать его массу. Меньшая потребной масса затвора, приводит к:
1. Раннему отпиранию затвора на расстояние большее (примерно 1,5-2,5 мм) чем длинна утолщенной донной части гильзы, что приводит в конечном итоге к ее поперечному разрыву под давлением пороховых газов.
2. Чрезмерно высокому, неконтролируемому темпу стрельбы в очереди.
При этом, достаточная для обеспечения работы автоматики масса затвора не только увеличивает общую массу оружия, но и приводит к увеличению колебаний оружия при стрельбе очередями за счет быстрого возвратно-поступательного движения массивного затвора и (особенно) его ударов в крайних положениях.
Известны многочисленные попытки решить данную конструктивную проблему:
1. Снизить потребную массу свободного затвора за счет увеличения трения между стенкой гильзы и патронника. Из простейшего расчета видно, что если трение стенок (длина) гильзы превосходит некоторую предельную величину, система работать не будет, так как гильза при выстреле останется в патроннике и скорее всего получит поперечный разрыв, что приведёт к заклиниванию оружия и может стать причиной травмы стрелка. Особенно велик риск такого развития события при использовании гильз с высоким коэффициентом бутылочности из-за того, что пороховые газы давят как на донце такой гильзы, так и на её скат изнутри.
2. Применением механических систем, замедляющий перемещение затвора, т.е. применение т.н. полусвободного затвора. Это позволяет решить большую часть проблем, но лишает схему главного преимущества - конструктивной и физической простоты, делая такие системы не менее сложными, чем более надежные системы, например, с газовым двигателем.
3. Применение гидравлических или пневматических систем поглощения энергии. Эти системы имеют низкую надежность при высокой сложности изготовления.
Предлагается конструктивное решение проблемы за счет введения дополнительной немеханической силы замедляющей движение свободного затвора, причем обеспечивающей не только замедление перемещения, но и вообще контроль и управление этим движением.
Наиболее эффективными для выработки движущих сил (моментов) оказываются устройства, основанные на преобразовании электрической энергии в механическую.
Хорошо известны их преимущества: легкость преобразования параметров и передачи энергии, возможность максимального приближения электромеханического преобразователя к рабочему механизму, гибкость управления процессами преобразования.
При этом наилучшая гибкость управления механическим движением достигается за счет использования вентильного безколлекторного управляемой микроконтроллером по обратной связи электромеханического преобразователя и исключения из состава электропривода механических элементов. Такой электропривод обычно называется безредукторным, или прямым, электроприводом с вентильным двигателем.
Конструкторская задача фактически в этом случае распадается на две части:
1. Обеспечить запирание затвора в период нарастания давления в стволе до максимального и далее, до его спадения до оптимального.
2. Обеспечить замедление-контролирование перемещения затвора после его отпирания.
Для решения первой задачи электромеханическое преобразование малопригодно из-за того, что перемещение при этом минимально - менее 2 мм, а усилия необходимые для удержания затвора — максимальны. Анализ существующих - и охватывающих практически все поле задачи — решений показывает, что оптимальным является схема запирания затвора давлением пороховых газов при минимальном (околонулевом) перемещении газового поршня — т. н. схема немецкого инженера Курта Хорна. Эта схема требует минимального количества элементов, собственно только миниатюрного газового поршня, его возвратной пружины и отверстия в стволе вблизи патронника, отличается технологичностью изготовления, практической нечувствительностью к загрязнению, ввиду очень малого перемещения поршня и очень высокой надежностью: в свое время советскими специалистами было произведено 1900 выстрелов из трофейного автомата Хорна во всех мыслимых вариантах - смазанном и промытом от смазки, при -60Сº и +50Сº, из чистого и специального запыленного насухо и поверх смазки — ноль (!) отказов по вине автоматики.
Решение второй задачи на основе электромеханического преобразования так же имеет ряд решений, из которых оптимальными, на взгляд автора, являются два:
А. Торможение затвора вихретоковым тормозом.
Б. Торможение и контроль перемещения затвора прямым линейным обратимым электромеханическим преобразователем с микроконтроллерным управлением по обратной связи.
Первое решение обладает простотой конструкции и очень высокой надежностью - такие тормоза традиционно применяются там, где необходима высокая гарантия срабатывания системы торможения, свойством автобалансирования, так как вихретоковый тормоз тем эффективней, чем выше скорость движения тормозимого элемента. Но это решение не позволяет осуществлять контроль перемещения затвора, поэтому в данном случае рассматриваться не будет.
Формула:
АВТОМАТИКА ОРУЖИЯ НА ОСНОВЕ МЕХАНИЧЕСКИ ПОЛУСВОБОДНОГО ЗАТВОРА, ЗАПИРАЕМОГО ГАЗОВЫМ ПОРШНЕМ, ПЕРЕМЕЩЕНИЕ КОТОРОГО УПРАВЛЯЕТСЯ ПРЯМЫМ ЛИНЕЙНЫМ ОБРАТИМЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ.
Особенности конструкции:
1. Все элементы прямого электромеханического преобразователя (ЭМП), включая схему управления, коммутатор-инвертор, устройство накопления электроэнергии встроены непосредственно в затвор, исключая только зубчатый статор, расположенный на ствольной коробке или любой другой неподвижной части конструкции оружия.
2. Система электромеханического преобразователя является замкнутой по энергии, не требующей внешних источников питания.
3. Наиболее подходящей конкретной системой ЭМП представляется линейная синхронная машина с сосредоточенными обмотками и зубчатыми полюсами с возбуждением от постоянных магнитов с микроконтроллерным управлением по бездатчиковой, основанной на анализе поведения электромагнитных переменных в основной электроцепи, схеме.
4. В качестве возбуждающих постоянных магнитов наиболее эффективным представляется применение высококоэрцитивных редкоземельных магнитов, в качестве накопителей электроэнергии - конденсаторов, а в качестве элементов коммутатора - MOSFET или IGBT транзисторов.
5. В настоящее время стоимость электронных систем стала гораздо ниже высокоточных механических. То же относится и к остальным элементам системы. В то же время цена изготовления прецизионной механики, с высокими требованиями к чистоте поверхности и точности геометрических размеров дорожает с каждым годом. Например, для обеспечения работы линейного ЭМП при практической неизменности характеристик зазор между статором и якорем может колебаться в пределах от 0,01 мм до 0,1 мм, в то время как части затвора/затворной рамы автомата Калашникова должны быть обработаны до 7-8 классов чистоты.
Рассмотрим вариант конкретной реализации подобного устройства.
В системе имеет механический свободный затвор с возвратной пружиной и УСМ курочного типа с боевой пружиной, запираемого двумя шепталами - одиночного огня с спуском от спускового крючка и автоматического огня с спуском при помощи соленоидной защелки. На чашечке затвора находится экстрактор для аварийного извлечения патрона/гильзы, в прорезь в теле затвора входит неподвижно закрепленный на направляющей ствольной коробки отражатель гильзы. Так же на ствольной коробке закреплен (или является ее конструктивной частью) зубчатый статор ЭМП. Вся конструкция ЭМП, а именно: управляющий микроконтроллер, электрическая схема с слаботочной и сильноточной частями, инвертор-коммутатор, токопроводящие шины, накопитель электроэнергии, катушки и магниты ротора непосредственно встроены в затвор и являются его конструктивной частью. Так как вся электронная часть находится внутри металлического затвора и залита компаундом устройство полностью нечувствительно к внешнему ЭМИ и влаге.
При освобождении курка от удерживающего его шептала одиночного огня при нажатии на спусковой крючок, боек, от удара курка, накалывает капсюль, происходит выстрел. Пороховые газы оказывают давление одновременно на пулю, на газовый поршень и на донце гильзы. Нарастающее давление пороховых газов через газовый поршень удерживает затвор неподвижным. После падения давления до оптимального, происходит расцепление затвора и газового поршня и затвор начинает движение. При этом газовый поршень, в отличии от оригинальной схемы Хорна, больше не контактирует с затвором и не оказывает на него никакого влияния. После начала движения затвора в электроцепи появляется электроток, запитывающий микроконтроллер (МК), что является моментом начала отработки им программы управления. Контролируя параметры тока в цепи, МК тормозит через ЭМП, работающий в генераторном режиме, затвор. В конце движения затвора, непосредственно у крайнего заднего положения, возможно, потребуется работа ЭМП в качестве электродвигателя, создающего обратный направлению движения момент (активный электротормоз). Так как МК контролирует параметры выстрела на всем его протяжение за счет контроля тока в цепи, то возможен привод затвора к задней конечной точке с минимально возможной или вообще околонулевой скоростью. Извлечение гильзы происходит без участия закреплённого на затворе выбрасывателя - он лишь удерживает её в чашечке затвора. Гильза двигаясь назад, набегает на отражатель и выбрасывается вовне. При этом взводится боевая пружина, и курок становится на электромагнитное шептало автоматического огня. При движении затвора вперед, в зависимости от необходимых параметров движения, ЭМП может либо снова подтормаживать движение затвора, либо, например, для увеличения скорострельности, наоборот, разгонять затвор, опять так останавливая его для недопущения удара в крайнем переднем положении.
Кроме того, элекромеханический преобразователь, под управлением МК осуществляет так же функцию, важного для схемы Хорна, противоотскочного устройства — не допускает отскок затвора от крайне переднего положения, гарантируя зацепление газового поршня с затвором. После окончания цикла при положении затвора в крайнем переднем положении с зацеплением с газовым поршнем схема обесточивается и, соответственно, электромагнитное шептало автоматического огня освобождает курок. Если снято и шептало одиночного огня (положение «автоматический огонь») цикл повторяется.
. .
Это сообщение редактировалось 06.11.2014 в 17:05
Иллюстрации:
Система Хорна

Элементарный модуль линейного вентильного ЭМП:
Система Хорна

Элементарный модуль линейного вентильного ЭМП:
Прикреплённые файлы:
Некоторые комментарии:
1. Предложенная система обладает интересным свойством "инженерной самобансировки" Чем легче затвор, тем большую скорость он приобретает при откате, и тем мощнее, а следовательно ТЯЖЕЛЕЕ, должен быть электромеханический преобразователь...но ЭМП является ЧАСТЬЮ САМОГО ЗАТВОРА, и чем он тяжелее, тем меньшей мощностью должен обладать ")
2. Возникает возможность стрельбы с <выката>, т.е. электромагнитное шептало освобождает курок до прихода в крайнее переднее положение, при незапертом затворе. Так как перемещение затвора и процесс выстрела полностью контролируется МК, то опасные ситуации связанные с затяжным выстрелом и разбросом параметров воспламенения и горения в разных патронах полностью исключаются. Таким образом, возможен режим автоматической стрельбы, в котором одиночный/первый выстрел происходит с закрытого затвора, а все последующие в очереди - с выката, с целью уменьшения отдачи.
3. Возникает так же интересная возможность автоматического извлечения осечного патрона, за счет перемещения затвора ЭМП только за счет энергии, накопленной в предыдущем выстреле. Если осечный патрон оказывается первым в очереди/или при одиночном выстреле, то он извлекается ручным перемещением затвора.
4. Сам по себе ЭМП может быть источником энергии для внешних устройств передаваемой вовне, например, через индукционное устройство.
5. Интересным может является рассмотрение данной конструкции как "гаусс-ган наизнанку". Вместо того, что бы отказаться от пороха и ускорять метаемый элемент за счет электроэнергии, что является очень сложной задачей, в данном случае предлагается использовать преобразование энергии пороха в электромагнитную, с последующим ее использованием не для ускорения пули, а замедления свободного затвора и контролируемой работы автоматики.
?
1. Предложенная система обладает интересным свойством "инженерной самобансировки"
Чем легче затвор, тем большую скорость он приобретает при откате, и тем мощнее, а следовательно ТЯЖЕЛЕЕ, должен быть электромеханический преобразователь...но ЭМП является ЧАСТЬЮ САМОГО ЗАТВОРА, и чем он тяжелее, тем меньшей мощностью должен обладать 2. Возникает возможность стрельбы с <выката>, т.е. электромагнитное шептало освобождает курок до прихода в крайнее переднее положение, при незапертом затворе. Так как перемещение затвора и процесс выстрела полностью контролируется МК, то опасные ситуации связанные с затяжным выстрелом и разбросом параметров воспламенения и горения в разных патронах полностью исключаются. Таким образом, возможен режим автоматической стрельбы, в котором одиночный/первый выстрел происходит с закрытого затвора, а все последующие в очереди - с выката, с целью уменьшения отдачи.
3. Возникает так же интересная возможность автоматического извлечения осечного патрона, за счет перемещения затвора ЭМП только за счет энергии, накопленной в предыдущем выстреле. Если осечный патрон оказывается первым в очереди/или при одиночном выстреле, то он извлекается ручным перемещением затвора.
4. Сам по себе ЭМП может быть источником энергии для внешних устройств передаваемой вовне, например, через индукционное устройство.
5. Интересным может является рассмотрение данной конструкции как "гаусс-ган наизнанку". Вместо того, что бы отказаться от пороха и ускорять метаемый элемент за счет электроэнергии, что является очень сложной задачей, в данном случае предлагается использовать преобразование энергии пороха в электромагнитную, с последующим ее использованием не для ускорения пули, а замедления свободного затвора и контролируемой работы автоматики.
?
 Bredonosec
Bredonosec
про тяжесть затвора - всё равно ведь должен быть тяжелым в результате.. плюс еще и мощная электроника в ударопрочном исполнении...
Про извлечение осечного - а если после извлечения шибнет? как при затяжном. Не опасно-ли?
про связь газового поршня с затвором по наброску не понял.
Про извлечение осечного - а если после извлечения шибнет? как при затяжном. Не опасно-ли?
про связь газового поршня с затвором по наброску не понял.

 spam_test
spam_test

Wyvern-2> ?
имхо, проблема та же самая что у исходной схемы хорна, мелкая фигурная дырочка в патроннике которую сложно чистить. Что то ведь после войны схему не повторяли.
имхо, проблема та же самая что у исходной схемы хорна, мелкая фигурная дырочка в патроннике которую сложно чистить. Что то ведь после войны схему не повторяли.


Bredonosec> про тяжесть затвора - всё равно ведь должен быть тяжелым в результате..плюс еще и мощная электроника в ударопрочном исполнении...
У автомата Хорна при энергии выстрела 1800-2000Дж масса затвора была 0,8-09кг -что вообще то многовато для современного оружия. Например, масса затворной части (затворная рама+личинка) автомата Калашникова составляет 520 грамм при энергии 1300-1400Дж. Предлагаемая схема позволит уменьшить массу затвора до...скажем так -до минимальной массы в разумных пределах, например до 200-300 граммов. Электрическая схема вовсе не такая уж "мощная" - энергия в цикле составляет 15-25Дж, при весьма высоком КПД, порядка 80-85% Самые тяжелые части - якорь, весом в 30-40 грамм и конденсатор с удельной энергоемкостью 0,2-0,3 Дж/грамм, т.е. весом 50-70 грамм. Если использовать ионисторы - то грамм 10-15. Ударопрочность обеспечивается монтажом на шинах (медные полосы вместо проводов) и заливкой компаундом.
Главное преимущество - минимальное количество механических деталей, в разы меньшее, чем у других конструкций и высокая надежность -электроника практически вечная, а механика ею защищена.
У автомата Хорна при энергии выстрела 1800-2000Дж масса затвора была 0,8-09кг -что вообще то многовато для современного оружия. Например, масса затворной части (затворная рама+личинка) автомата Калашникова составляет 520 грамм при энергии 1300-1400Дж. Предлагаемая схема позволит уменьшить массу затвора до...скажем так -до минимальной массы в разумных пределах, например до 200-300 граммов. Электрическая схема вовсе не такая уж "мощная" - энергия в цикле составляет 15-25Дж, при весьма высоком КПД, порядка 80-85% Самые тяжелые части - якорь, весом в 30-40 грамм и конденсатор с удельной энергоемкостью 0,2-0,3 Дж/грамм, т.е. весом 50-70 грамм. Если использовать ионисторы - то грамм 10-15. Ударопрочность обеспечивается монтажом на шинах (медные полосы вместо проводов) и заливкой компаундом.
Главное преимущество - минимальное количество механических деталей, в разы меньшее, чем у других конструкций и высокая надежность -электроника практически вечная, а механика ею защищена.
Это сообщение редактировалось 04.11.2014 в 21:46
Wyvern-2>> ?
s.t.> имхо, проблема та же самая что у исходной схемы хорна, мелкая фигурная дырочка в патроннике которую сложно чистить. Что то ведь после войны схему не повторяли.
Это ерунда") "Дырочка" в стволе у Калашникова имеет те же размеры И расположена посередине ствола, а не у патронника. И открывает изогнутый почти под 900 газовый тракт И что?
"Дырочка" в стволе у Калашникова имеет те же размеры И расположена посередине ствола, а не у патронника. И открывает изогнутый почти под 900 газовый тракт И что?
Мало кто знает, что газовый поршень схемы Калашникова - чрезвычайно сложный, прецизионный элемент. Он должен ходить по длинному тракту, невзирая на нагар. Не говорю уже о схеме Стоуна - там ваащее ховайся кто может! А у системы Хорна поршень вообще практически НЕ ИМЕЕТ ХОДА -во время выстрела он тупо УПИРАЕТСЯ в затвор. 1900 выстрелов без единой осечки в тяжелых условиях - это результат непосильный даже для схемы Михаил Тимофеевича.
P.S. А не использовали ее после ВМВ по причине того, что не решена была основная проблема - ВЕС СИСТЕМЫ в целом. Затвор все же был тяжеловат.
s.t.> имхо, проблема та же самая что у исходной схемы хорна, мелкая фигурная дырочка в патроннике которую сложно чистить. Что то ведь после войны схему не повторяли.
Это ерунда
И расположена посередине ствола, а не у патронника. И открывает изогнутый почти под 900 газовый тракт И что? Мало кто знает, что газовый поршень схемы Калашникова - чрезвычайно сложный, прецизионный элемент. Он должен ходить по длинному тракту, невзирая на нагар. Не говорю уже о схеме Стоуна - там ваащее ховайся кто может! А у системы Хорна поршень вообще практически НЕ ИМЕЕТ ХОДА -во время выстрела он тупо УПИРАЕТСЯ в затвор. 1900 выстрелов без единой осечки в тяжелых условиях - это результат непосильный даже для схемы Михаил Тимофеевича.
P.S. А не использовали ее после ВМВ по причине того, что не решена была основная проблема - ВЕС СИСТЕМЫ в целом. Затвор все же был тяжеловат.
 excorporal
excorporal

Wyvern-2> Мало кто знает, что газовый поршень схемы Калашникова - чрезвычайно сложный, прецизионный элемент.
Намного проще автомобильного, скажем так.")
Wyvern-2> Он должен ходить по длинному тракту, невзирая на нагар.
Да какой там нагар, газовая трубка вся дырявая... А еще можно стрелять (и даже перезаряжаться) и без нее. Правда, иногда поршень утыкается.
Shooting AK47 Without a GAS TUBE. Will it Cycle??
Here we learn if an AK47 can function properly without a gas tube installed. Using my Arsenal SGL-10/63 as a scientific test subject. Shooting AK47 Without a GAS TUBE. Will it Cycle? (AKM, AK-47, AK) I intend to continue this series, time permitting! if you want to see more be sure to comment and like so I know that's what people want to see.
Намного проще автомобильного, скажем так.
Wyvern-2> Он должен ходить по длинному тракту, невзирая на нагар.
Да какой там нагар, газовая трубка вся дырявая... А еще можно стрелять (и даже перезаряжаться) и без нее. Правда, иногда поршень утыкается.

Shooting AK47 Without a GAS TUBE. Will it Cycle??
Here we learn if an AK47 can function properly without a gas tube installed. Using my Arsenal SGL-10/63 as a scientific test subject. Shooting AK47 Without a GAS TUBE. Will it Cycle? (AKM, AK-47, AK) I intend to continue this series, time permitting! if you want to see more be sure to comment and like so I know that's what people want to see.


s.t.>> имхо, проблема та же самая что у исходной схемы хорна, мелкая фигурная дырочка в патроннике которую сложно чистить. Что то ведь после войны схему не повторяли
Судя по схеме "дырочка" открывается только после прохождения пули.
Т.е все это время давление действует только на затвор и пулю.
Поэтому затвор и тяжелый.
Судя по схеме "дырочка" открывается только после прохождения пули.
Т.е все это время давление действует только на затвор и пулю.
Поэтому затвор и тяжелый.

Wyvern-2>> Мало кто знает, что газовый поршень схемы Калашникова - чрезвычайно сложный, прецизионный элемент.
excorporal> Намного проще автомобильного, скажем так.
Ню-ню
Представляю слово автору, который области оружия "сам себе ссылка" (и к сожалению пока сюда не заглянул )
)
varban> Пока не выйдет из газовой камеры, поршень с лабиринтными уплотнениями центрируется газодинамически - как мина в миномете. Поскольку расстояние между направляющими и поршнем довольно большое, то и рама мало болтается. На момент прохождения дульного среза затвор все еще закрыт, рама только-только уперлась в копир и затвор еще не начал поворачиваться, отпирая канал.
varban> Давление резко падает, но поскольку рама уже приобрела скорость (и энергию) то она дальше двигается, теряя энергию на отпирание затвора, на сжатие возвратной пружины, на экстракцию и выбрасывание гильзы и по мелочам на взведение ударно-спускового механизма и на поджатие очередного патрона вниз и назад. Последнее - очень важно, таким образом патрон встает точно на месте подачи, несмотря на несколько миллиметрового люфта в магазине.
varban> На этом пути давление падает по экспоненте, пока пуля не пройдет дульный срез. Дальше начинается резкое падение давления в канале ствола, и газы в камере начинают истекать частично обратно в ствол. А поршень этим временем прошел цилиндрическую часть камеры и его торец проходит через скругленную и длинную фаску. Еще до того задняя часть поршня, однако, заходит в зиги газовой трубки.
varban> Особенность движения подвижных частей калаша - малые углы соударения поверхностей. Таким макаром компенсируют "вывешенность" автоматики и избегают кувальдометрию. Иначе калаш не выдержал бы и 1/10 настрела.
varban> Это - очень грубое описание работы механизмов. Пишу с неудобного девайса, не имея ничего перед глазами, сугубо по памяти с армии да еще и с курса лекции прикладной газодинамики, который читал оружейникам лет 15 назад. Тогда им еще полигонную практику читал, а там все эти вещи меряли в реале. И расшифровывали велосиграммы. Каждый пик, перелом и перегиб расписывали и привязывали к работе или к отклонениям в работе автоматики.
varban> Простота калаша - обманчива. В газодинамическом и чисто механическом плане из-за люфтов и зазоров калаш - среди самых сложных представителей автоматического оружия.
Источник: А почему "калашников" лучше???? [varban#23.01.12 22:56]
Что то я не видел. что бы автомобильный поршень центрировался газодинамически Но факт остается фактом - система Калашникова НЕ ДЛЯ БЕДНЫХ И СИРЫХ - это оружие сверхдержавы, где рецепты стали не поддаются обратному анализу...
excorporal> Намного проще автомобильного, скажем так.
Ню-ню
Представляю слово автору, который области оружия "сам себе ссылка" (и к сожалению пока сюда не заглянул
)varban> Пока не выйдет из газовой камеры, поршень с лабиринтными уплотнениями центрируется газодинамически - как мина в миномете. Поскольку расстояние между направляющими и поршнем довольно большое, то и рама мало болтается. На момент прохождения дульного среза затвор все еще закрыт, рама только-только уперлась в копир и затвор еще не начал поворачиваться, отпирая канал.
varban> Давление резко падает, но поскольку рама уже приобрела скорость (и энергию) то она дальше двигается, теряя энергию на отпирание затвора, на сжатие возвратной пружины, на экстракцию и выбрасывание гильзы и по мелочам на взведение ударно-спускового механизма и на поджатие очередного патрона вниз и назад. Последнее - очень важно, таким образом патрон встает точно на месте подачи, несмотря на несколько миллиметрового люфта в магазине.
varban> На этом пути давление падает по экспоненте, пока пуля не пройдет дульный срез. Дальше начинается резкое падение давления в канале ствола, и газы в камере начинают истекать частично обратно в ствол. А поршень этим временем прошел цилиндрическую часть камеры и его торец проходит через скругленную и длинную фаску. Еще до того задняя часть поршня, однако, заходит в зиги газовой трубки.
varban> Особенность движения подвижных частей калаша - малые углы соударения поверхностей. Таким макаром компенсируют "вывешенность" автоматики и избегают кувальдометрию. Иначе калаш не выдержал бы и 1/10 настрела.
varban> Это - очень грубое описание работы механизмов. Пишу с неудобного девайса, не имея ничего перед глазами, сугубо по памяти с армии да еще и с курса лекции прикладной газодинамики, который читал оружейникам лет 15 назад. Тогда им еще полигонную практику читал, а там все эти вещи меряли в реале. И расшифровывали велосиграммы. Каждый пик, перелом и перегиб расписывали и привязывали к работе или к отклонениям в работе автоматики.
varban> Простота калаша - обманчива. В газодинамическом и чисто механическом плане из-за люфтов и зазоров калаш - среди самых сложных представителей автоматического оружия.
Источник: А почему "калашников" лучше???? [varban#23.01.12 22:56]
Что то я не видел. что бы автомобильный поршень центрировался газодинамически
Но факт остается фактом - система Калашникова НЕ ДЛЯ БЕДНЫХ И СИРЫХ - это оружие сверхдержавы, где рецепты стали не поддаются обратному анализу...
 drsvyat
drsvyat

Bredonosec> про связь газового поршня с затвором по наброску не понял.
Поршень передает на затвор усилие в противоположном от направления отката затвора направлении, что частично компенсирует давление пороховых газов действующее на затвор и уменьшает скорость его отката.
Красивое решение, но не прижилось, значит не без недостатков.
Поршень передает на затвор усилие в противоположном от направления отката затвора направлении, что частично компенсирует давление пороховых газов действующее на затвор и уменьшает скорость его отката.
Красивое решение, но не прижилось, значит не без недостатков.

А что автор скажет за магнитные поля, образующиеся при такой конструкции? Какие значения?
varban>> Простота калаша - обманчива. В газодинамическом и чисто механическом плане из-за люфтов и зазоров калаш - среди самых сложных представителей автоматического оружия.
С этим не спорю. Удачная, в некотором смысле гениальная система, каждый элемент которой сам по себе простойкак пробка. То, что стреляет без газовой трубки и без крышки ствольной коробки тоже вызывает восхищение.
Wyvern-2> Что то я не видел. что бы автомобильный поршень центрировался газодинамически
Тем не менее, он сложнее калашовского.
Wyvern-2> Но факт остается фактом - система Калашникова НЕ ДЛЯ БЕДНЫХ И СИРЫХ - это оружие сверхдержавы, где рецепты стали не поддаются обратному анализу...
Вылизать систему АК может и по силам только сверхдержавы, но потом эту систему копируют кулибины из Вазиристана...
С этим не спорю. Удачная, в некотором смысле гениальная система, каждый элемент которой сам по себе простой
Wyvern-2> Что то я не видел. что бы автомобильный поршень центрировался газодинамически
Тем не менее, он сложнее калашовского.
Wyvern-2> Но факт остается фактом - система Калашникова НЕ ДЛЯ БЕДНЫХ И СИРЫХ - это оружие сверхдержавы, где рецепты стали не поддаются обратному анализу...
Вылизать систему АК может и по силам только сверхдержавы, но потом эту систему копируют кулибины из Вазиристана...
Accept> А что автор скажет за магнитные поля, образующиеся при такой конструкции? Какие значения?
Магнитные поля как поля Создаются высококоэрцитивными магнитами (см. иллюстрацию №2), скорее всего самарий-кобальтовыми с высокой рабочей температурой (Траб +350C0, точка Кюри +800С0) как и в любом вентильном ЭД с возбуждением от постоянных магнитов. С точки зрения этих самых электромоторов данный линейный электропривод не представляет из себя ничего особенного ни по скоростям перемещения, ни по ускорениям, ни по мощности,ни по точности, подобные широко применяются в прямых прецизионных приводах.
Магнитные поля как поля
Создаются высококоэрцитивными магнитами (см. иллюстрацию №2), скорее всего самарий-кобальтовыми с высокой рабочей температурой (Траб +350C0, точка Кюри +800С0) как и в любом вентильном ЭД с возбуждением от постоянных магнитов. С точки зрения этих самых электромоторов данный линейный электропривод не представляет из себя ничего особенного ни по скоростям перемещения, ни по ускорениям, ни по мощности,ни по точности, подобные широко применяются в прямых прецизионных приводах.
Wyvern-2>> Но факт остается фактом - система Калашникова НЕ ДЛЯ БЕДНЫХ И СИРЫХ - это оружие сверхдержавы, где рецепты стали не поддаются обратному анализу...
excorporal> Вылизать систему АК может и по силам только сверхдержавы, но потом эту систему копируют кулибины из Вазиристана...
И копии остаются работоспособными только благодаря действительно гениальной схеме Ни по надежности, ни по эксплуатационным характеристикам любые копии АК рядом не лежат с оригиналом.
excorporal> Вылизать систему АК может и по силам только сверхдержавы, но потом эту систему копируют кулибины из Вазиристана...
И копии остаются работоспособными только благодаря действительно гениальной схеме
Ни по надежности, ни по эксплуатационным характеристикам любые копии АК рядом не лежат с оригиналом.
drsvyat> Красивое решение, но не прижилось, значит не без недостатков.
Да. Недостаток одЫн: несмотря на то, что система Хорна снижает нагрузки на затвор на 70-75% затвор все равно остается чрезмерно тяжелым Напомню, что в автомате Курта Хорна под Курцпатрон 7,92х33 затвор весил 0,9 кг, и при этом оружие все равно было склонно к саморазгону(самопроизвольному увеличению темпа стрельбы) Т.е. по уму, если бы его делали не на "коленке", затвор весил бы 1,1-1,2 кг... Сравни теперь с массой подвижной части (затворная рама с ГП+личинка+ударник+ВБ-пружина) АК под 7,62х39-520 граммов...
А вот моя схема...
Да. Недостаток одЫн: несмотря на то, что система Хорна снижает нагрузки на затвор на 70-75% затвор все равно остается чрезмерно тяжелым Напомню, что в автомате Курта Хорна под Курцпатрон 7,92х33 затвор весил 0,9 кг, и при этом оружие все равно было склонно к саморазгону(самопроизвольному увеличению темпа стрельбы) Т.е. по уму, если бы его делали не на "коленке", затвор весил бы 1,1-1,2 кг... Сравни теперь с массой подвижной части (затворная рама с ГП+личинка+ударник+ВБ-пружина) АК под 7,62х39-520 граммов...
А вот моя схема...

Я правильно понимаю, что идея настолько красивая, что такими приземленными вещами как расчеты автор заморачиваться не стал?

Wyvern-2> Представляю слово автору, который области оружия "сам себе ссылка" (и к сожалению пока сюда не заглянул )
В области порохов, и то на авиабазе
Давай глянь на СПГ-9. Там средиправославного чугуния железа есть и электрический девайс, заметно проще, чем то, что ты предлагаешь, а именно - стреляющий механизм. Вот что представляет этот шайтан-девайс:

Не показан еще провод, блокировка и контакты.
Как тебе он?
)В области порохов, и то на авиабазе
Давай глянь на СПГ-9. Там среди
Макет генератора электростреляющего механизма СПГ-9
Макет генератора электростреляющего механизма СПГ-9 // www.nastavleniya.ruНе показан еще провод, блокировка и контакты.
Как тебе он?
Wyvern-2> А вот моя схема...
Тебе надо в первые 2 мм движения затворной рамы поглотить порядка 50 Дж энергии. Это реально?
Ну и если во время дождя пробьет на корпус, стрелку будет весьма неприятно, по идее вырубит надолго.
Тебе надо в первые 2 мм движения затворной рамы поглотить порядка 50 Дж энергии. Это реально?
Ну и если во время дождя пробьет на корпус, стрелку будет весьма неприятно, по идее вырубит надолго.
drsvyat> Ну и если во время дождя пробьет на корпус, стрелку будет весьма неприятно, по идее вырубит надолго.
Ну, пробивать там особо нечему. Тут проблемы более фундаментальные. Мне лень считать, зуб не дам, но 100 баксов положу, что по энергетике баланс не сойдется.
Второе. Очевидно, что сила торможения при таком способе не может быть больше чем при вихретоковом, так чтобы баланс сходился хотя бы теоретически. И тут тоже возникают сомнения в потребных массах и габаритах для достаточного торможения.
Я б скорее думал об электромагнитном соленоидном запирании. Перед твоей схемой у него есть уже то преимущество, что его на бумажке посчитать можно
Ну, пробивать там особо нечему. Тут проблемы более фундаментальные. Мне лень считать, зуб не дам, но 100 баксов положу, что по энергетике баланс не сойдется.
Второе. Очевидно, что сила торможения при таком способе не может быть больше чем при вихретоковом, так чтобы баланс сходился хотя бы теоретически. И тут тоже возникают сомнения в потребных массах и габаритах для достаточного торможения.
Я б скорее думал об электромагнитном соленоидном запирании. Перед твоей схемой у него есть уже то преимущество, что его на бумажке посчитать можно
GOGI> Тут проблемы более фундаментальные. Мне лень считать, зуб не дам, но 100 баксов положу, что по энергетике баланс не сойдется.
Угу. Раз есть преобразование энергии, будут потери. А у электрике потери бесшумные (до пробоя), зато горячие.
Угу. Раз есть преобразование энергии, будут потери. А у электрике потери бесшумные (до пробоя), зато горячие.
Wyvern-2>> А вот моя схема...
drsvyat> Тебе надо в первые 2 мм движения затворной рамы поглотить порядка 50 Дж энергии. Это реально?
ДЫЫЫККК!!! ЧИТАТЬ ВНИМАТЕЛЬНО НАДО!!! Именно с этой проблемой я и столкнулся поначалу и на нее мне указал Макс Попенкер. И именно поэтому применена схема Хорна
drsvyat> Ну и если во время дождя пробьет на корпус, стрелку будет весьма неприятно, по идее вырубит надолго.
Опять таки, ВНИМАТЕЛЬНО! Цитирую:
drsvyat> Тебе надо в первые 2 мм движения затворной рамы поглотить порядка 50 Дж энергии. Это реально?
ДЫЫЫККК!!! ЧИТАТЬ ВНИМАТЕЛЬНО НАДО!!! Именно с этой проблемой я и столкнулся поначалу и на нее мне указал Макс Попенкер. И именно поэтому применена схема Хорна
drsvyat> Ну и если во время дождя пробьет на корпус, стрелку будет весьма неприятно, по идее вырубит надолго.
Опять таки, ВНИМАТЕЛЬНО! Цитирую:
Так как вся электронная часть находится внутри металлического затвора и залита компаундом устройство полностью нечувствительно к внешнему ЭМИ и влаге.
GOGI>> Тут проблемы более фундаментальные. Мне лень считать, зуб не дам, но 100 баксов положу, что по энергетике баланс не сойдется.
varban> Угу. Раз есть преобразование энергии, будут потери. А у электрике потери бесшумные (до пробоя), зато горячие.
На "коленке" посчитаноЕсть избыток энергии. Вопрос в том, что идеальная модель движения затвора такова, что затвор должен подойти к заднему крайнему положению с нулевой скоростью...НО! Совсем не обязательна именно "идеальная" модель. Ведь в реальном оружии затвор имеет в заднем конечном положении значительные скорости - у Хорна это было порядка 4-5м/сек (и у Михаил Тимофеевича тоже примерно 5 м/с). Пусть затвор весит 0,4 кг, тогда при скорости 4-5 м/сек он будет иметь энергию 3-5 Дж - вот это и есть ЗАПАС ПО ЭНЕРГИИ.
Известно так же, что при аварийном срабатывании авттоматики Хорна - отскок затвора без воздействия газового поршня- затвор развивал скорость до 13 м/сек и разрушал затыльник. Т.е. полная энергия затвора была (0,85*132/2) ~70 Дж. Так, что есть запас порядка 10%
varban> Угу. Раз есть преобразование энергии, будут потери. А у электрике потери бесшумные (до пробоя), зато горячие.
На "коленке" посчитано
Есть избыток энергии. Вопрос в том, что идеальная модель движения затвора такова, что затвор должен подойти к заднему крайнему положению с нулевой скоростью...НО! Совсем не обязательна именно "идеальная" модель. Ведь в реальном оружии затвор имеет в заднем конечном положении значительные скорости - у Хорна это было порядка 4-5м/сек (и у Михаил Тимофеевича тоже примерно 5 м/с). Пусть затвор весит 0,4 кг, тогда при скорости 4-5 м/сек он будет иметь энергию 3-5 Дж - вот это и есть ЗАПАС ПО ЭНЕРГИИ.Известно так же, что при аварийном срабатывании авттоматики Хорна - отскок затвора без воздействия газового поршня- затвор развивал скорость до 13 м/сек и разрушал затыльник. Т.е. полная энергия затвора была (0,85*132/2) ~70 Дж. Так, что есть запас порядка 10%
Это сообщение редактировалось 06.11.2014 в 11:02
varban> Как тебе он?
Классический вариант смешивания в кучу механики и электромеханики-с суммированием недостатков
Вообще то мысль моя в т.ч. шла от того, что существуют схемы автоматики с электроприводом- они имеют свои преимущества и недостатки, а недостатки в основном связанны с необходимостью внешнего элекропитания. Фактически такие схемы являются аналогами редукторного электропривода -где электрическая энергия преобразуется во вращательное двжение ЭМ, а далее при помощи (викторианской сложности) механики она преобразуется в возвратно-поступательное и другое движение частей оружия. НО ВЕДЬ ПРЯМОЙ ЭЛЕКТРОПРИВОД ЭФФЕКТИВНЕЙ!!! Именно к прямому вентильному (читай - управляемому) электроприводу и пришло в конечном счете станкостроение и промробототехника.
Фактически моя схема - это инвертированный электропривод автоматики оружия
Классический вариант смешивания в кучу механики и электромеханики-с суммированием недостатков
Вообще то мысль моя в т.ч. шла от того, что существуют схемы автоматики с электроприводом- они имеют свои преимущества и недостатки, а недостатки в основном связанны с необходимостью внешнего элекропитания. Фактически такие схемы являются аналогами редукторного электропривода -где электрическая энергия преобразуется во вращательное двжение ЭМ, а далее при помощи (викторианской сложности) механики она преобразуется в возвратно-поступательное и другое движение частей оружия. НО ВЕДЬ ПРЯМОЙ ЭЛЕКТРОПРИВОД ЭФФЕКТИВНЕЙ!!!
Именно к прямому вентильному (читай - управляемому) электроприводу и пришло в конечном счете станкостроение и промробототехника. Фактически моя схема - это инвертированный электропривод автоматики оружия
Copyright © Balancer 1997..2019
Создано 04.11.2014
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 04.11.2014
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
